L'acquisizione dei dati primari.
L'elemento essenziale per l’acquisizione delle informazioni metriche primarie dell’oggetto è la camera da presa, dalla quale, in definitiva, dipende la precisione finale. La camera deve consentire la registrazione delle informazioni metriche, e al contempo permettere di riprodurle con minime deformazioni. La conoscenza dei parametri geometrici propri, e la loro stabilità nel tempo, è un fattore determinate, basti pensare a quali sollecitazioni è posto il sistema ottico durante un volo, la cui quota può portarlo ad esporlo a temperature estremamente basse. Proprio in funzione della conoscenza, e della diversa affidabilità, delle grandezze geometriche caratterizzanti il sistema ottico, si definiscono tre diverse tipologie di camere. In questo studio, in particolare, presteremmo attenzione alla presa aerea, per la quale si utilizzano solo esclusivamente camere metriche.
camere metriche
Queste camere sono appositamente costruite per applicazioni fotogrammetriche, sono dotate di obbiettivi con elevate peculiarità ottiche, in grado di limitarne la distorsione radiale e, comunque, di cui deve essere nota la legge di variazione, cioè la curva di distorsione; i parametri di distorsione radiale e i parametri di orientamento interno devono essere periodicamente verificati attraverso operazioni di calibrazione, i cui risultati sono contenuti nel relativo certificato, il quale può essere richiesto anche come obbligo capitolare. Le camere metriche hanno un orientamento interno noto e costante nel tempo.
camere semimetriche
Sono camere caratterizzate da un orientamento interno noto, ma non costante nel tempo, le distorsioni sono maggiormente presenti, anche se devono essere note. Sono camere non pensate per la fotogrammetria, ma adattate a questa successivamente.
camere amatoriali
Di uso comune, vengono ad essere impiegate solo per applicazioni di scarsa precisione e associate a procedure operative non convenzionali, ad esempio con operazioni di autocalibrazione (ambito architettonico).
LA CAMERA DA PRESA.
Ecco quello che scriveva l’Enciclopedia Treccani, nel 1932, a riguardo della fotogrammetria aerea:
G li apparecchi da usare da bordo degli aerei possono essere semplici o multipli, a mano o automatici. I semplici hanno un solo obiettivo, e consentono di eseguire una sola fotografia per volta; i multipli due o più obiettivi con i quali si possono fare altrettante fotografie contemporanee su lastre situate in posizione invariabile l'una rispetto all'altra. Come lo dice il nome, le camere a mano sono tenute dall'operatore, il quale può rivolgerle in una direzione (…). Gli apparecchi automatici possono essere semplici o multipli e sono applicati all'aeroplano in modo opportuno per evitare, o almeno ridurre, l'influenza dannosa delle trepidazioni di questo; lo scatto dell'otturatore ha luogo automaticamente e ad intervalli di tempo costanti e regolabili per mezzo di apposito motorino o di un'elica fuori bordo, che azionano anche il meccanismo per il cambio delle lastre (contenute in appositi magazzini della capacità di 40-100 lastre ciascuno).
Da allora molti anni sono trascorsi, ma ben si doveva sottolineare da quali basi tecnologiche è nata la fotogrammetria aerea odierna. Eravamo negli anni ’30, il decennio che ha visto la comparsa sul mercato delle prime camere a pellicola, che hanno costituito la tecnologia di presa preferita, fino ai primi anni del terzo millennio, quando è arrivata, anche per la presa fotografica, la tecnologia digitale.
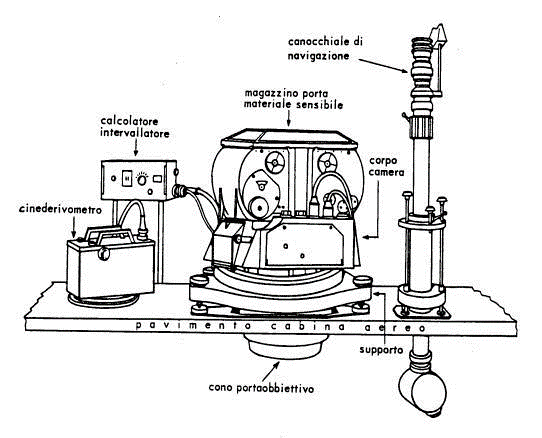
Fig. 2.12 – Schema generale di una camera da presa aerea analogica.
Come si nota la camera è sorretta da un basamento circolare girevole,
che ne garantisce un assetto costante, e limita in valori contenuti gli
angoli di rotazione. Nelle camere analogiche di prima generazione questo
accorgimento era ottenuto tramite l’uso di viti calanti, in epoca moderna
sostituite da giroscopi di precisione e attuatori d’assetto. Il fine è
quello di rendere orizzontale il piano principale della camera o, il che
è lo stesso, verticale il suo asse ottico, dato che le prese devono essere
il più possibili nadirali. La possibilità di ruotare la camera attorno
all’asse verticale serve per la correzione della deriva; sotto l’azione
del vento, infatti, l’aereo, che deve seguire una certa rotta, si sposta
lateralmente nello spazio, secondo un’altra direzione, inclinata rispetto
alla rotta prefissata di un angolo δ, detto angolo di deriva.
In questa condizione la camera da presa scatterebbe fotogrammi che verrebbero
a ricoprirsi in maniera non corretta. Ruotando invece il basamento della
camera, se ne ripristina il corretto orientamento, rispetto alla rotta
prevista nel progetto del volo, facendo in modo che la sovrapposizione
longitudinale sia per tutta la lunghezza del fotogramma. Questo consente
pure al pilota di porre il velivolo in assetto di opposizione, in modo
tale di consentire allo stesso di seguire la rotta prevista (Fig. 2.13).
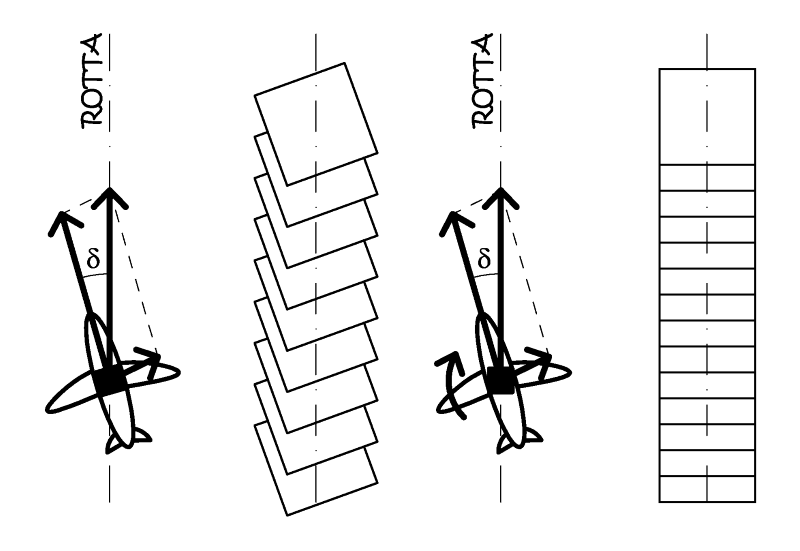
Fig. 2.13 – Azione dell’angolo di deriva.
Per la determinazione dell’angolo di deriva, che viene effettuata prima dell’inizio della presa, si impiega un semplice dispositivo a traguardi, il cinederivometro, spesso incorporato al periscopio di navigazione. Il cinederivometro è uno strumento, separato dalla camera, ma cablato con essa, e provvisto di un visore sul quale appare la stessa immagine del terreno ripresa dalla camera, a cui viene sovrapposta l’immagine di un reticolo che opera come indice mobile (Fig. 2.14). Difatti oltre al controllo della direzione di crociera, l’operatore di presa deve controllare gli intervalli di scatto; questi sono stati calcolati immaginando che l’aereo mantenga idealmente una velocità costante v lungo le sue traiettorie. In realtà, le azioni del vento (pur limitate) causano variazioni della velocità dell’aereo. Pertanto, se si mantenesse per tutto il volo l’intervallo di scatto calcolato a tavolino, si otterrebbero delle basi di presa B diverse da quelle programmate, e con esse la percentuale di ricoprimento longitudinale necessaria alla formazione dei modelli stereoscopici. Dunque è necessario controllare, ed eventualmente variare, gli intervalli di scatto ∆t durante il volo. L’operatore dovrà osservare il movimento relativo del terreno rispetto al reticolo del cinederivometro, e quindi, variare progressivamente la velocità dello stesso, fino ad annullarne il movimento. A questo punto gli automatismi della camera imporranno i corretti intervalli di scatto, per mantenere il ricoprimento longitudinale programmato.
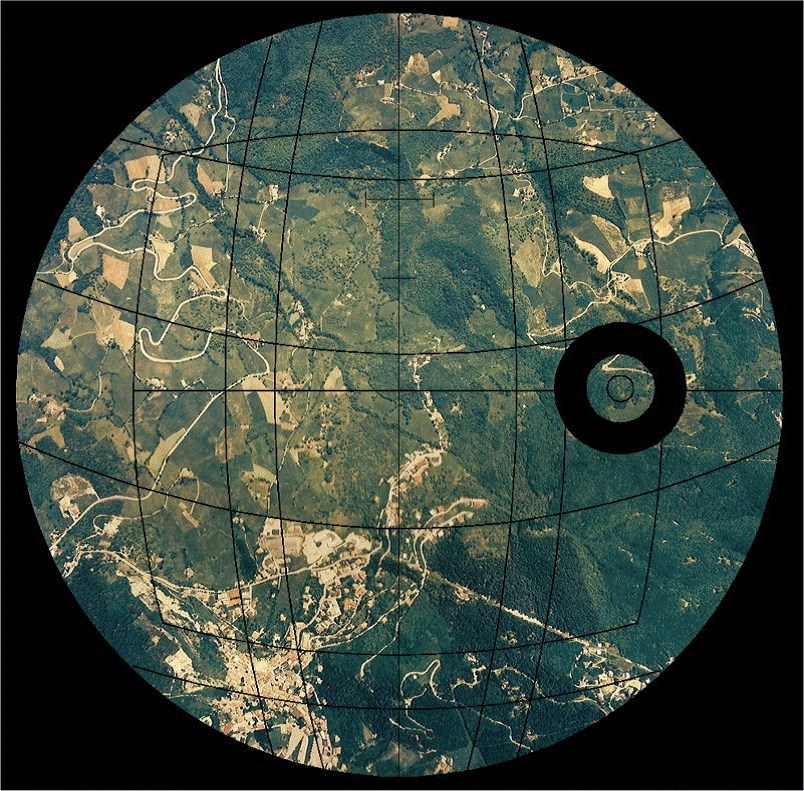
Fig. 2.14 – Visore del cinederivometro
Obbiettivo.
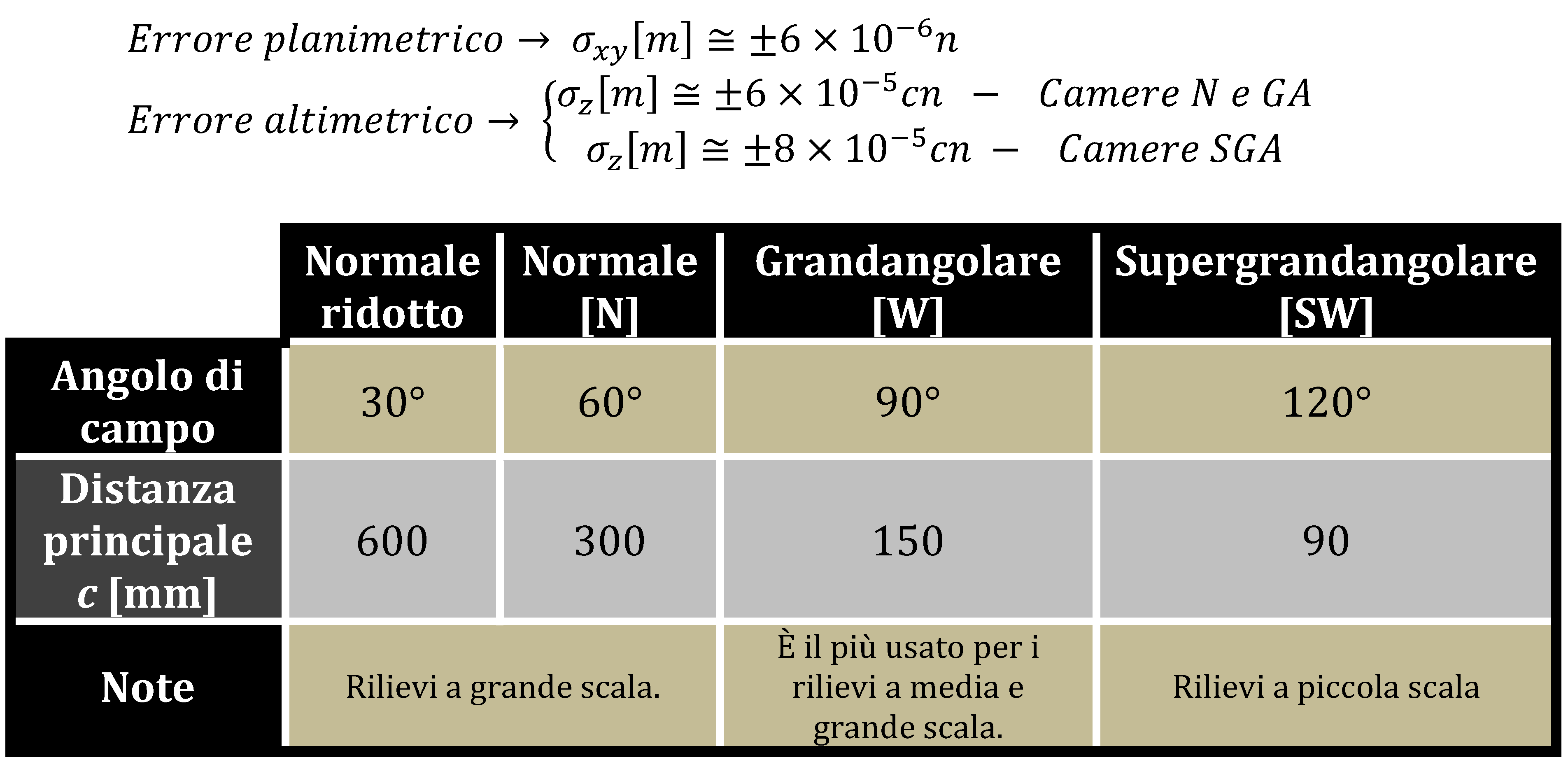
Si tratta di un complesso sistema ottico composto da più lenti, di dimensioni generose, per le camere metriche è a fuoco fisso, e ad ogni modo, date le distanze in gioco, le immagini saranno sempre e comunque a fuoco, dato che si opera su distanze di presa iperfocali. Gli elementi ottici inseriti, devono consentire di correggere le aberrazioni più dannose per l’uso fotogrammetrico, ed in particolare si cerca di ridurre al minimo la distorsione radiale. Gli obbiettivi delle camere per la presa aerea vengono classificati in base al valore dell’angolo di campo, dal quale dipende l’entità della distanza focale.

La configurazione più comunemente utilizzata è il formato grandangolare, con formato lastra utile di 230×230mm. Gli otturatori sono disposti fra le lenti componenti l’obiettivo (otturatori centrali); una serie di lamelle rotanti permettono l’apertura dell’obiettivo per un tempo che può essere compreso tra 1/200 e 1/1.000 di secondo. Come si nota, i tempi di esposizione sono molto brevi, condizione indispensabile per la presa aerea, dato che devono essere evitati gli effetti deleteri del trascinamento dell’immagine. Merita particolare attenzione la costruzione geometrica dell’obiettivo, difatti, in letteratura, spesso si definisce il processo fotografico di un oggetto, come la riproduzione prospettica dello stesso, questa ipotesi sarebbe confacente se si potesse considerare un qualsiasi obiettivo fotografico esattamente coincidente con un sistema ottico del tipo rappresentato in Fig. 2.15. In tal caso i centri di prospettiva coincidono con i centri nodali del sistema ottico, e i raggi proiettanti, passanti per i punti nodali, formano con l’asse ottico lo stesso angolo incidente, sia nello spazio-oggetto, che nello spazio-immagine; in tale condizione l’obiettivo potrebbe essere sostituito da una entità geometrica puntiforme, il centro di presa o il centro di proiezione.
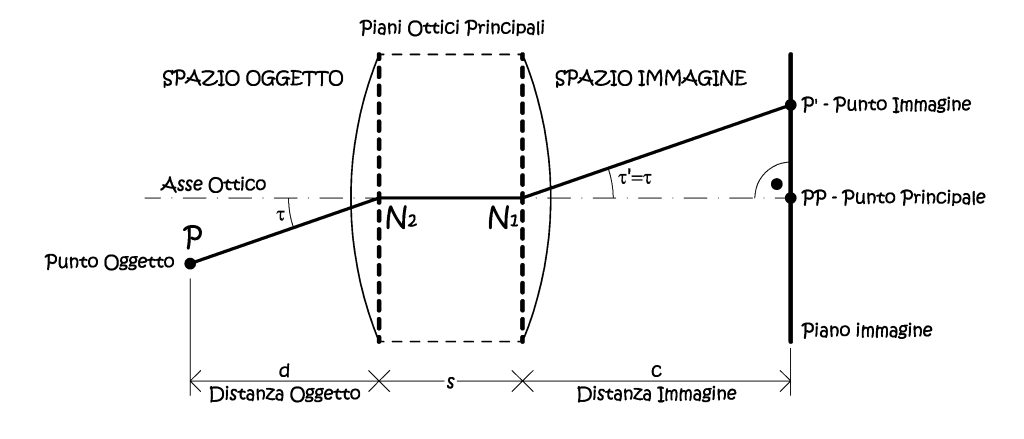
Fig. 2.15 – Geometria di un obbiettivo perfetto.
Nel caso ideale, i punti nodali del sistema ottico, coinciderebbero con i centri di prospettiva dello spazio-oggetto e dello spazio-immagine, ed inoltre il punto principale PP, definito dal piede della perpendicolare portata dal punto nodale N 1 al piano immagine, coinciderebbe con il punto di simmetria di questo (centro fiduciale, in fotogrammetria). L’ottica delle camere reali differisce profondamente da un sistema ottico ideale, qui l’asse ottico non contiene tutti i centri delle lenti sferiche, ed inoltre il piano dell’immagine non sarà più perfettamente perpendicolare al medesimo asse, per limiti costruttivi. Non si potrà più considerare le lenti infinitamente sottili, ma essendo dotate di spessore proprio, i punti nodali saranno in realtà individuati dalle pupille d’entrata e d’uscita delle stesse, dato che il fascio di raggi proiettivi ha un diametro finito all’interno del sistema ottico reale. Particolare attenzione merita la definizione della distanza focale, mentre per un obbiettivo perfetto essa coincide con la distanza principale di proiezione, questo non è vero per un obiettivo reale. La distanza focale è quella distanza che intercorre tra il punto nodale immagine, e il piano che realizza le migliori condizioni di focatura per l’oggetto inquadrato. Sappiamo dall’ottica che questa distanza varia in funzione della distanza oggetto, ma per la fotogrammetria aerea tale differenza è del tutto trascurabile, quindi la distanza focale è fissata dal costruttore per fotografare all’infinito, cioè a distanze superiori alla distanza iperfocale.
Pertanto l’asse di riferimento fotogrammetrico non sarà l’asse ottico, ma un raggio principale PRA che, nello spazio oggetto, è perpendicolare al piano immagine. Il suo prolungamento interseca il piano immagine nel cosiddetto punto principale di autocollimazione (PPA). I piani di proiezione principali non saranno più quelli previsti dalla teoria dell’obbiettivo perfetto, ma sono individuati dalle pupille di entrata e d’uscita dell’insieme ottico, ed esse realizzano i centri di prospettiva del sistema. L’insieme di questi errori ed imperfezioni è che gli angoli incidenti τ', nello spazio immagine, non sono uguali angoli τ, nello spazio oggetto. Da qui ci possiamo ricostruire un centro di prospettiva matematico, che ricostruisca la proiettività teorica del punto immagine, partendo dalla distanza principale, questo ci consente di valutare gli errori residuali di distorsione ottica (Fig. 2.16).
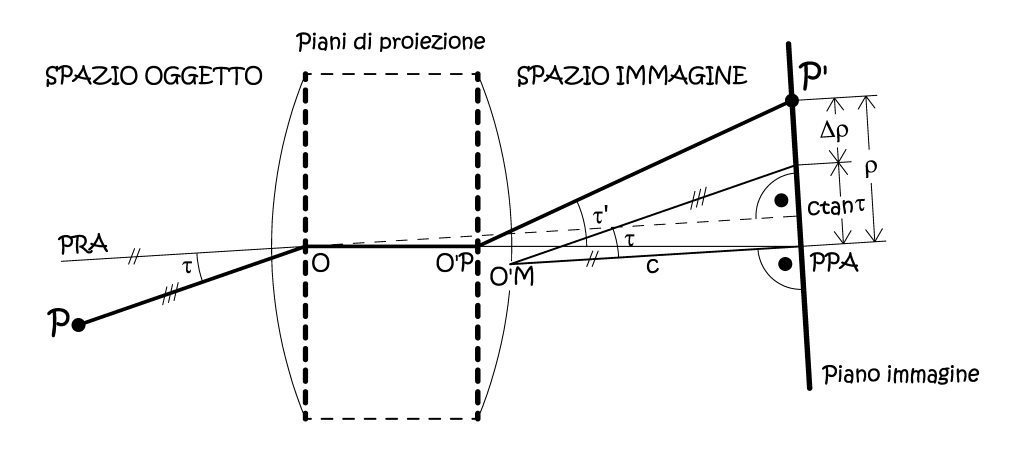
Fig. 2.16 – Geometria di un obbiettivo reale.
La distorsione non è solo nel piano della figura, ma essa si scompone in due direzioni: una componente radiale δr, ed una componente tangenziale δt (Fig. 2.17). A dire il vero la distorsione tangenziale viene sempre trascurata, dato che per obiettivi di elevata qualità costruttiva, essa è pari mediamente al 5% della distorsione tangenziale. I costruttori, per le camere metriche, misurano la distorsione lungo le quattro semidiagonali del formato immagine, da queste misure si ottengono quattro curve caratteristiche di distorsione ottica radiale. Dato che le differenze sono contenute, si procede ad operare una media tra le quattro curve, quindi si ipotizza una simmetria radiale per la distorsione, ricavando un’unica curva caratteristica per ogni obbiettivo, ed è questa che troviamo nei certificati di calibrazione forniti con le camere. Si sottolinea inoltre che la distanza principale c, viene scelta convenzionalmente come quella distanza che consente di ridurre la distorsione radiale su tutto il campo d’immagine.
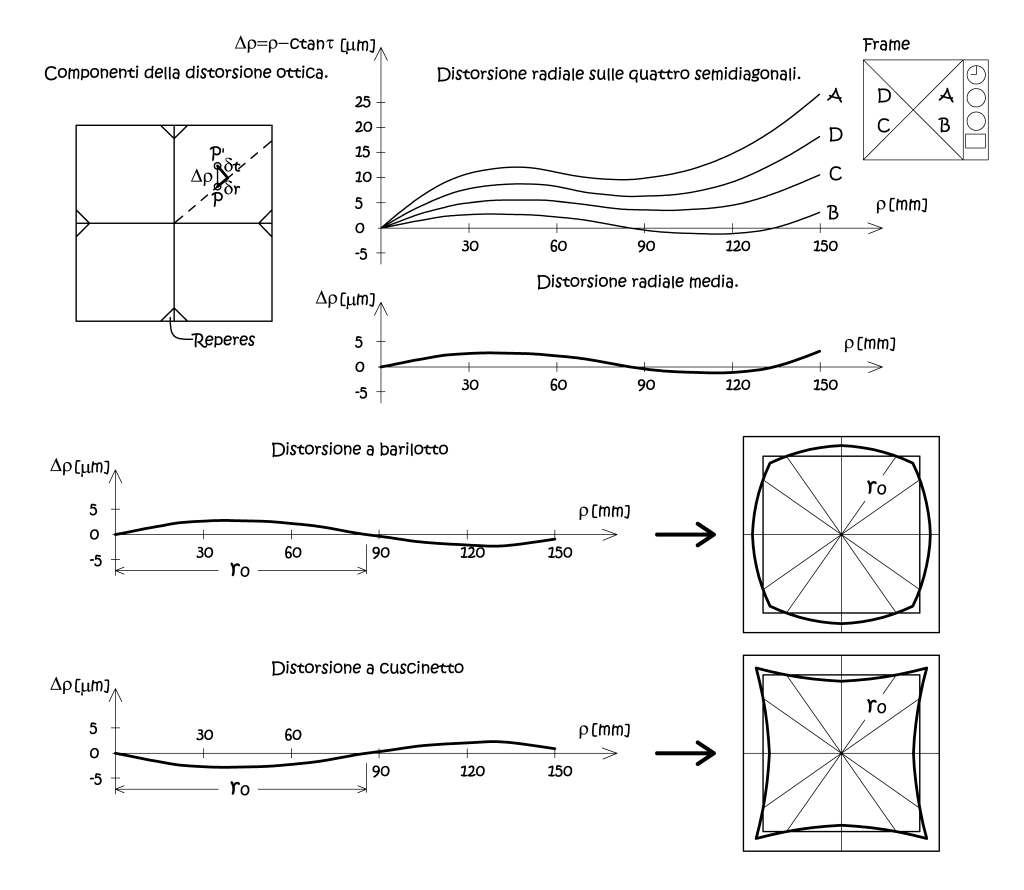
Fig. 2.17 – Caratterizzazione e natura della deformazione ottica.
La conoscenza della distorsione radiale, ci permette di considerare il processo fotografico alla pari di una proiezione geometrica centrale. Per alcune camere la distorsione radiale può essere determinata con tecniche di autocalibrazione, ma le precisioni ottenibili ne escludono l’uso aereofotogrammetrico.
La geometria interna e il materiale fotografico.
La camera da presa può essere vista come un elemento geometrico, difatti essa può essere schematizzata come lo sviluppo di un’entità piramidale diversamente orientata nello spazio: la base è rappresentata dal piano lastra/pellicola, il suo vertice è il centro di presa, definito dal punto nodale immagine, e la sua altezza è la distanza principale (Fig. 2.15). Nei termini già visti, la nostra semplificazione, ci porta a trascurare l’esistenza dei due punti distinti di proiettività nodale, vista la conoscenza dei parametri distorsivi, e la grande distanza di presa, rispetto alla lunghezza focale, che qui assumerà ora il significato di distanza principale, in accordo con le definizioni espresse dalla geometria proiettiva. Osserviamo poi che il centro di presa, dunque il centro di proiezione, si trova in posizione interposta tra la lastra e l’oggetto ripreso; ciò genera un’immagine capovolta rispetto alla disposizione dell’oggetto, cioè la sua immagine fotografica espressa dal piano del negativo. Ma è sempre possibile ottenere un’immagine identica al negativo, ma diritta come l’oggetto, denominata positivo. In termini di geometria proiettiva, sarebbe l’immagine che si formerebbe su un piano di presa collocato in posizione anteposta e simmetrica, rispetto al punto di presa, questo ci consente di trascurare tale aspetto, ai fini matematici, dato che le stelle proiettive, sono fra loro omotetiche (Fig. 2.18).
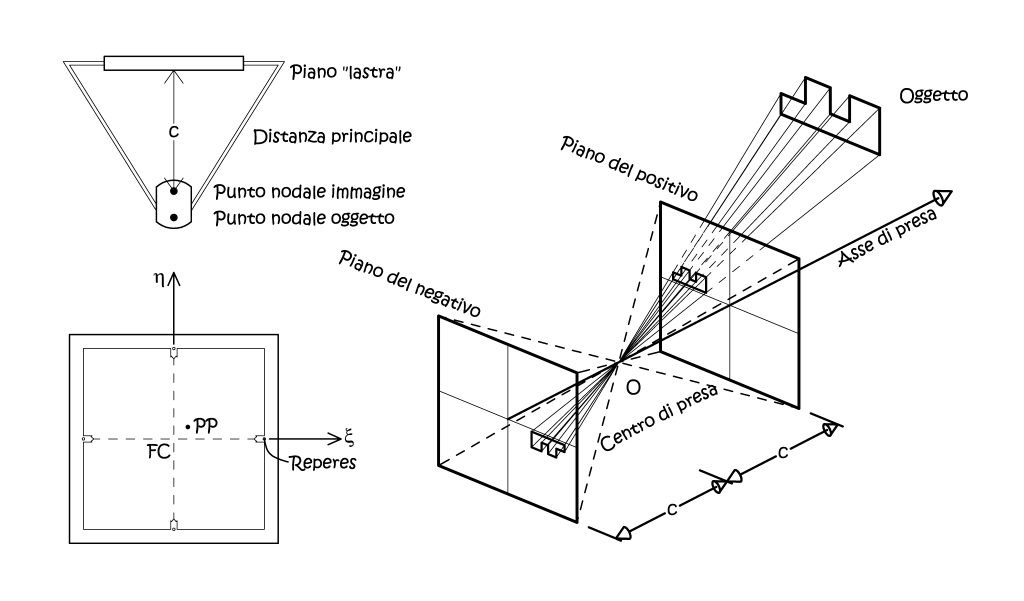
Fig. 2.18 – La geometria della camera e schema della presa fotografica.
In figura è rappresentato il cono oscuro, che collega rigidamente il sistema ottico dell’obbiettivo con il piano lastra di esposizione, esso inoltre presenta una cornice provvista di piccole aperture, che durante l’apertura dell’otturatore consentono di impressionare sulla pellicola le quattro marche fiduciali o reperes (Fig. 2.19). La funzione di queste è di materializzare un sistema di riferimento immagine (ξ;η), la cui origine è individuata dal centro fiduciale FC. Per motivi costruttivi, il centro fiduciale non coinciderà con il punto principale PP, e il valore di questo scostamento dovrà essere indicato nel certificato di calibrazione della macchina.

Fig. 2.19 – Alcuni esempi di marche fiduciali; da sinistra a destra le camere fotogrammetriche Zeiss, Leica e Wild.
Oltre ai reperes, ogni fotogramma riporta un margine, il data strip, sul
quale sono inserite diverse informazioni.
• Una livella sferica.
• Il numero di serie della camera impiegata.
• Il valore della distanza principale c.
• La data e l’ora dello scatto.
• Un altimetro, per il controllo della quota di volo, con una sensibilità
di 10m, ed una deviazione standard di ±20÷50m.
• Un contatore del numero di frame e della strisciata.
• Alcune camere hanno la possibilità di riportare i parametri di assetto
del volo, ma questi hanno scarsa precisione, e non vengono mai usati.
Il materiale fotografico è contenuto all’interno del magazzino superiore (Fig. 2.20), intercambiabile in pochi secondi, costituito da 120-150m di pellicola (poliestere indeformabile), per consentire un’autonomia anche di 600 fotogrammi (23×23cm) senza ricambi. Date le precisioni richieste, per eliminare le deformazioni meccaniche indesiderate della pellicola, questa, all’istante della presa, è spianata su di una piastra piana, forata e collegata ad una pompa pneumatica di depressione.
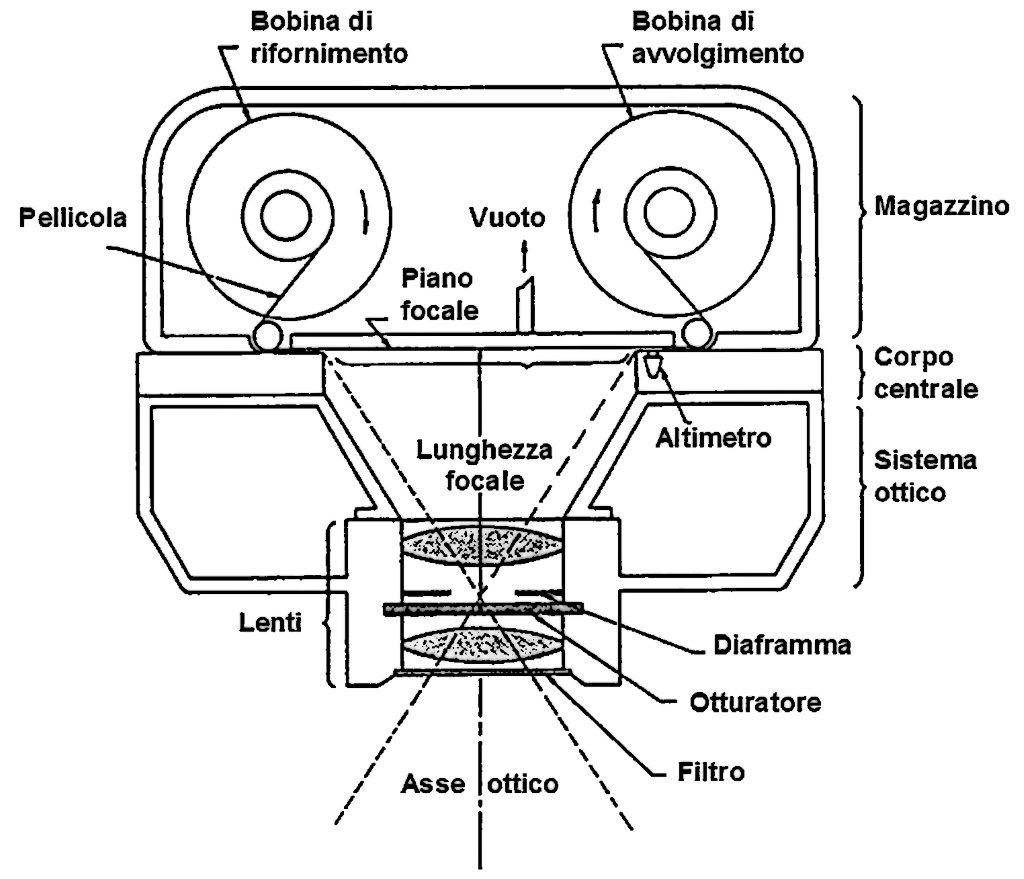
Fig. 2.20 – Schematizzazione di una camera fotogrammetrica
Le pellicole che si utilizzano in fotogrammetria aerea possono essere
diverse, e il loro uso è relazionato allo scopo dello studio1. Per scopi
di restituzione metrica si usano quasi sempre pellicole pancromatiche in
bianco e nero, questo consente di raggiungere maggiori capacità di dettaglio,
essendo presente una sola emulsione monostrato, anche se, non si sono disdegnate
le versioni colorate, soprattutto negli ultimi anni, prima della conversione
al digitale.
Il potere risolvente dell’emulsione fotosensibile non è il solo fattore
da considerare, dato che la presa avviene in movimento, si possono avere
effetti indesiderati di “trascinamento dell’immagine” (Fig. 2.21). L’aereo
assume due posizioni diverse, all’inizio e alla fine del tempo di esposizione,
corrispondente all’intervallo di tempo nel quale l’otturatore rimane aperto.
Per quanto contenuto sia questo arco temporale ∆τ, il moto dell’aereo produrrà
sempre sul fotogramma, l’effetto di trascinamento delle immagini. Durante
questo intervallo di tempo, il centro di presa O, si sposta nella posizione
O*, percorrendo il tratto ∆b, per cui il raggio proiettante non ha impressionato
il singolo punto A', ma il tratto λ. Operando su triangoli simili posso
scrivere che:

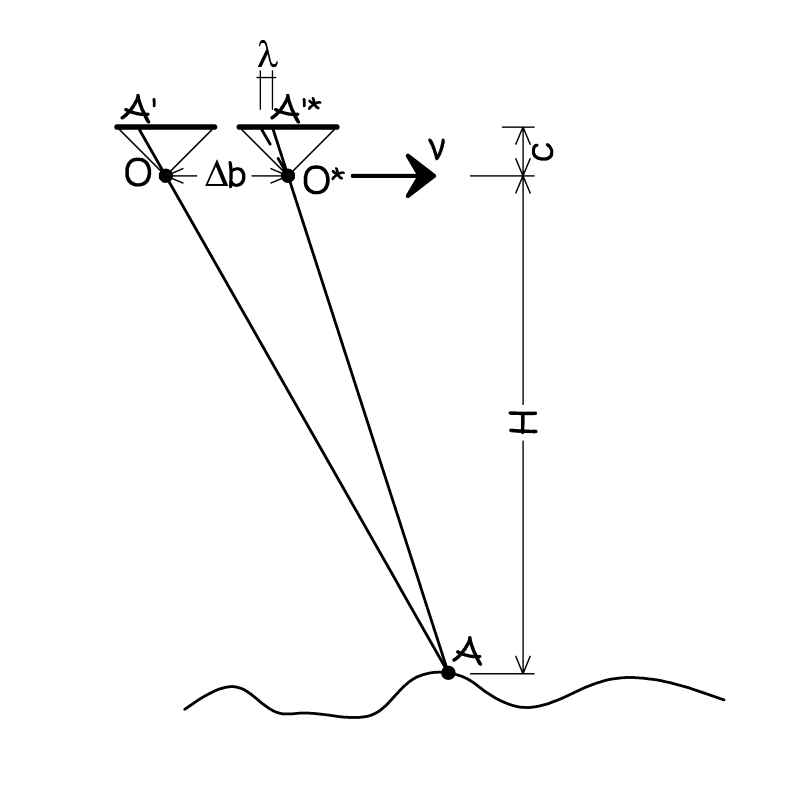
Fig. 2.21– Trascinamento dell’immagine.
L’entità del trascinamento è, come si evince, legata alla quota media di volo e alla velocità dell’aereo, quindi essa impatta maggiormente per i voli a grande scala, quindi con quota contenuta, oppure con l’uso di camere a grande focale. Il progresso tecnologico ha consentito, se non di eliminare, almeno di abbattere la maggior parte del problema. Dalla fine degli anni ’80 tutte le camere da presa sono dotate di un dispositivo, il Forward Motion Compensation (FMC), che consente, durante il tempo di posa, di compensare il moto apparente del suolo con lo spostamento del piano focale; in particolare l’FMC è stato introdotto dalla Leica RC20 (Fig. 2.22). Tale spostamento può raggiungere i 60 mm/s, che corrispondono ad una velocità di 430 Km/h, ed una quota di volo di 2.000m. In questo modo le immagini risultano nitide; in pratica valori di trascinamento sino a 0,035mm possono essere considerati irrilevanti.

Fig. 2.22 – Camera da presa aerea Leica RC30, sostituì il modello RC20, che ebbe il merito di introdurre nel 1988 il meccanismo di compensazione della lastra (FMC). Lo strumento è composto da un obbiettivo di grandi dimensioni, il cui peso raggiunge i 58Kg, supporto giroscopico e cassette porta film. La sua produzione termina nel 2006, sostituita dal modello digitale ADS40, introdotta due anni prima.
Tutte le camere fotogrammetriche dovrebbero essere ricalibrate ad intervalli regolari, ad esempio una volta all’anno. Basti pensare che tutto l’apparato è sottoposto ad elevati sbalzi termici, che possono raggiungere anche i 50°C per quote di volo elevate, ed inoltre le fasi di atterraggio sono spesso fonte di sollecitazioni per tutti gli apparati. In sede di calibrazione, eseguita dalla casa costruttrice, viene rilasciato il già citato certificato di calibrazione, comprendente i seguenti dati.
- Coordinate immagine delle marche fiduciali.
- Nello stesso sistema le coordinate del punto principale.
- La distanza principale c.
- La curva di distorsione radiale residua.
- Informazioni sul campo di risoluzione dell’immagine.
- La data della calibrazione.
il progetto del volo.
l concetto fondante delle fotogrammetria aerea è il poter disporre
per tutti i punti rilevati di una loro immagine stereoscopica, difatti
una foto, come si è già scritto, è una proiezione centrale, che non contiene
informazioni sufficienti per definire la posizione e le dimensioni di un
oggetto tridimensionale (lo sarebbe solo se l’oggetto fosse piano). In
effetti dalla figura 2.23, si può osservare che il punto A', sul piano
di una sola lastra con centro di presa O
1
, non è l’omologo del solo punto A oggetto, ma lo è anche per tutti gli
altri infiniti punti, che si trovano lungo il raggio proiettore r
1
, rendendo il problema indeterminato. Tuttavia queste informazioni possono
essere ottenute disponendo di due foto dello stesso oggetto, osservato
da due punti di presa O
1
e O
2
. In questo caso la posizione spaziale del punto oggetto è univocamente
determinata, quale punto d’intersezione delle due rette proiettanti r
1
ed r
2
.
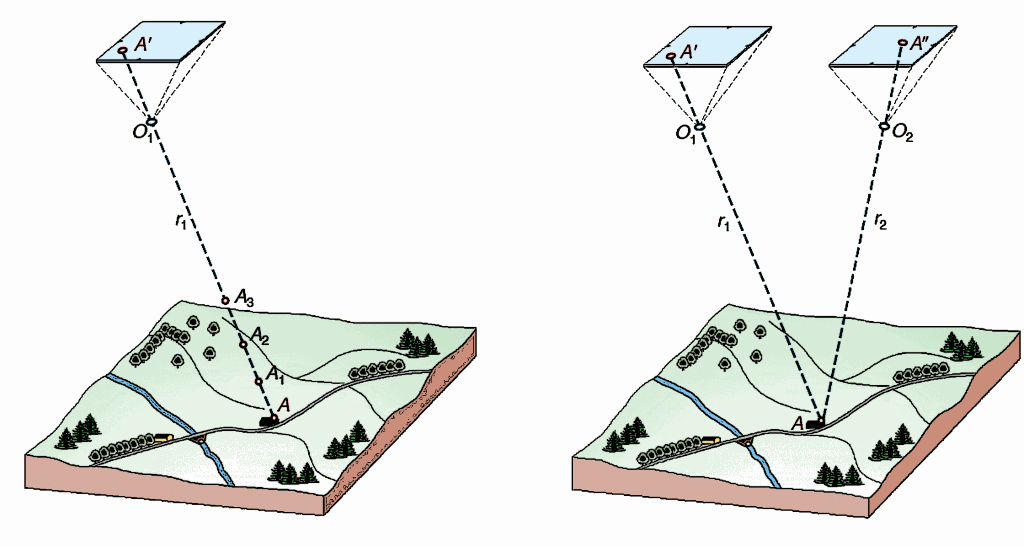
Fig. 2.23 – Il concetto di presa stereoscopica.
Il progetto della copertura fotografica richiede la precisa conoscenza di quali prodotti cartografici si vuole ottenere. Solamente a partire da ciò, possiamo fissare i criteri caratterizzanti il rilievo, che sono la quota di volo H e la base di presa b, ove quest’ultima è profondamente legata alla percentuale di ricoprimento longitudinale μ. Il principio alla base della fotogrammetria aerea è garantire il ricoprimento di tutto il territorio ripreso, in modo stereografico: ogni punto al suolo deve essere visibile su almeno due fotogrammi. La zona in comune a due fotogrammi successivi prende il nome di modello stereoscopico.
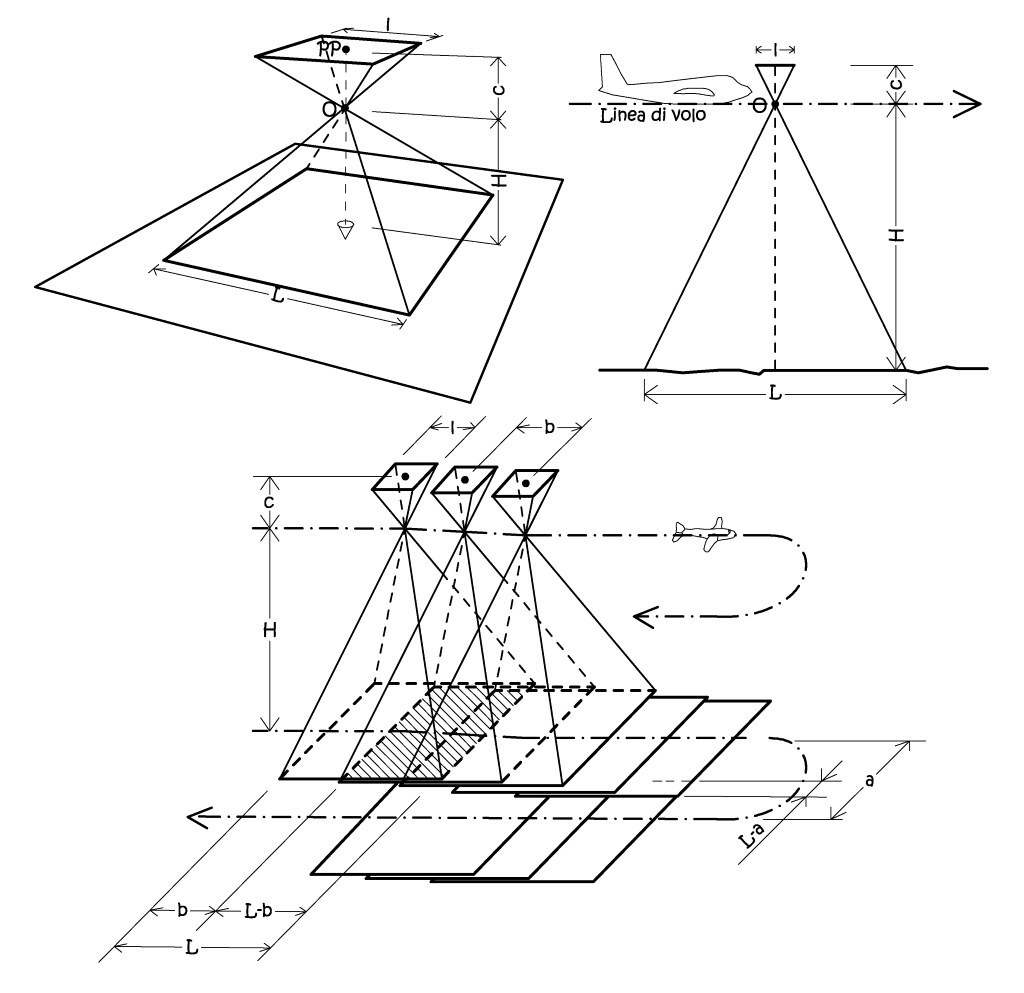
Fig. 2.24 – Configurazione geometrica della presa aerea
Si consideri ora un terreno pianeggiante, ed una presa nadirale, in questa condizione ottimale, il fascio dei raggi proiettanti che convergono nel centro di presa, da luogo alla relazione di similitudine tra triangoli simili, dalla quale si desume la definizione di scala media del fotogramma:

Ove n è il denominatore della scala del fotogramma, intesa come il rapporto
tra la dimensione di un elemento lineare sul fotogramma e, la corrispondente
dimensione sull’oggetto. Ciò che viene scritto in termini matematici è
una idealizzazione della realtà; difatti, in generale, l’oggetto fotografato
non è né piano ne ortogonale all’asse della camera, quindi il valore scelto
per H sarà un valore medio, così come dovrà essere per la scala medesima.
La definizione di scala media di un fotogramma non è pertanto rigorosa,
e può essere indicata grossolanamente, o come la media delle scale estreme,
dovute alle quote massime e minime del terreno, oppure come la scala dovuta
alla quota prevalente nell'area in esame. Detta q la quota di volo assoluta
e q
t
la quota media del terreno, la scala media del fotogramma risulta dalla
relazione:

Si faccia attenzione che per quota di volo si intende sempre la quota barometrica, cioè riferita al livello del mare, quindi, nella corretta interpretazione, a questa andrà sottratta la quota media del terreno. La quota di volo è pari al prodotto della distanza principale c per la scala media del fotogramma n, questa dev’essere scelta con attenzione, dato che da essa dipende il costo del volo e la cartografia che è possibile realizzare.

In sede di progetto del volo si utilizzano delle relazioni di natura empirica, che consentono di stimare la precisione con cui possono essere restituite le coordinate terreno. Tale precisione dovrà essere relazionata con le prestazioni metriche attese dai prodotti della restituzione che, storicamente, sono sempre state delle carte. Da un punto di vista dell’operatività topografica, il rilievo fotogrammetrico, si configura similmente all’intersezione in avanti, la quale richiede il rispetto del seguente rapporto geometrico, per una ottimale distribuzione degli errori.

Questa semplice relazione ci consente di definire una prima stima della percentuale di ricoprimento longitudinale (endlap), che per camere grandangolari (c≅150mm) richiederebbe una copertura del 25%, ma tale percentuale sarebbe insufficiente per la copertura stereografica complessiva del terreno e, per la sovrapposizione dei modelli stessi, quindi solitamente la percentuale di sovrapposizione longitudinale è del 60%. Il dettaglio più minuto che è possibile rappresentare su carta, senza che questo risenta di errori di graficismo, è pari a 0,2mm; nella tabella che segue sono riportate le scale nominali di rappresentazione cartografica, attualmente in uso, e le precisioni attese.
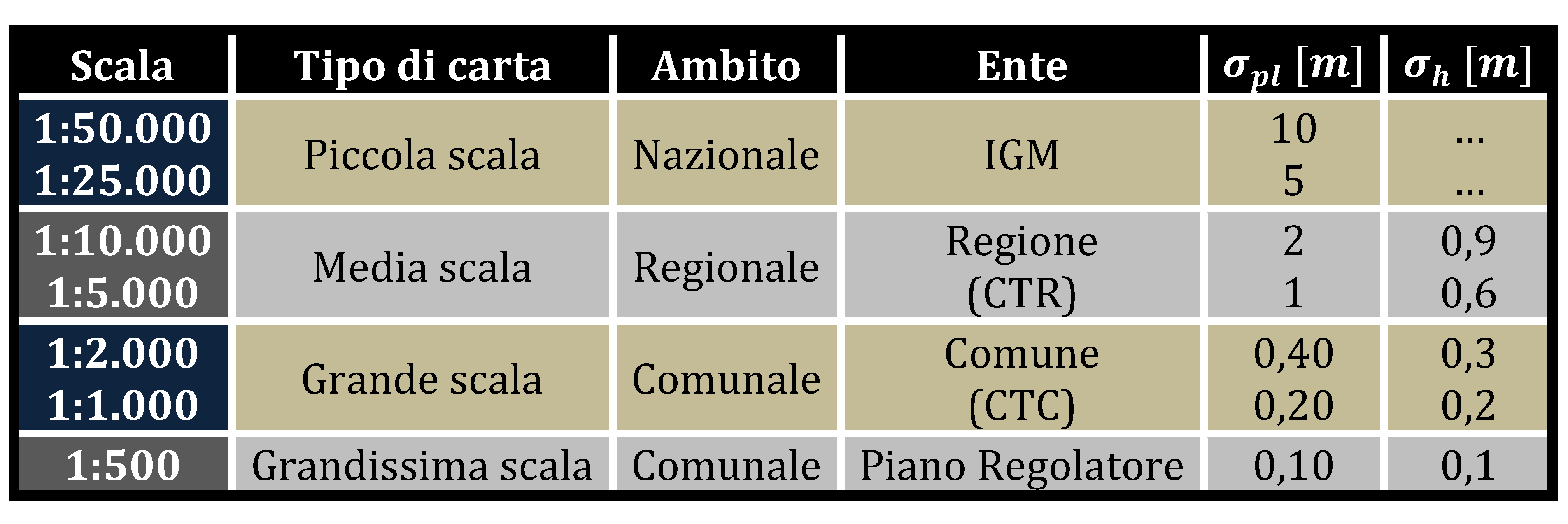
A partire da queste semplici deduzioni, possiamo ricavarci la scala del fotogramma congruente con le precisioni richieste nella definizione delle coordinate del terreno, appartenenti al singolo modello.
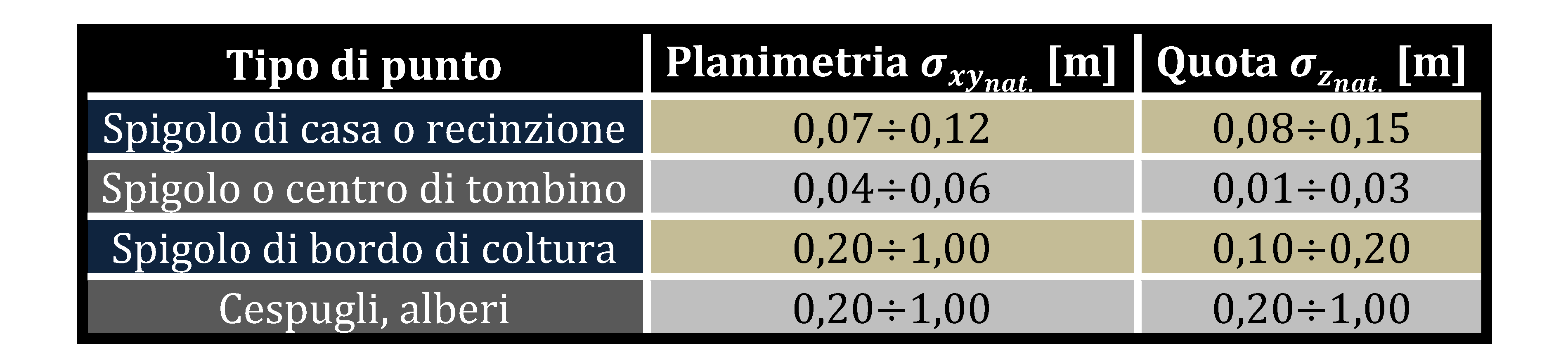
Queste sono le precisioni che è possibile ottenere nelle migliori condizioni possibili, ma spesso ci sono delle difficoltà di collimazione, che trascendono dalle capacità tecniche del mezzo, ma sono legate alle incertezze di valutazione operative durante la restituzione dei punti naturali.
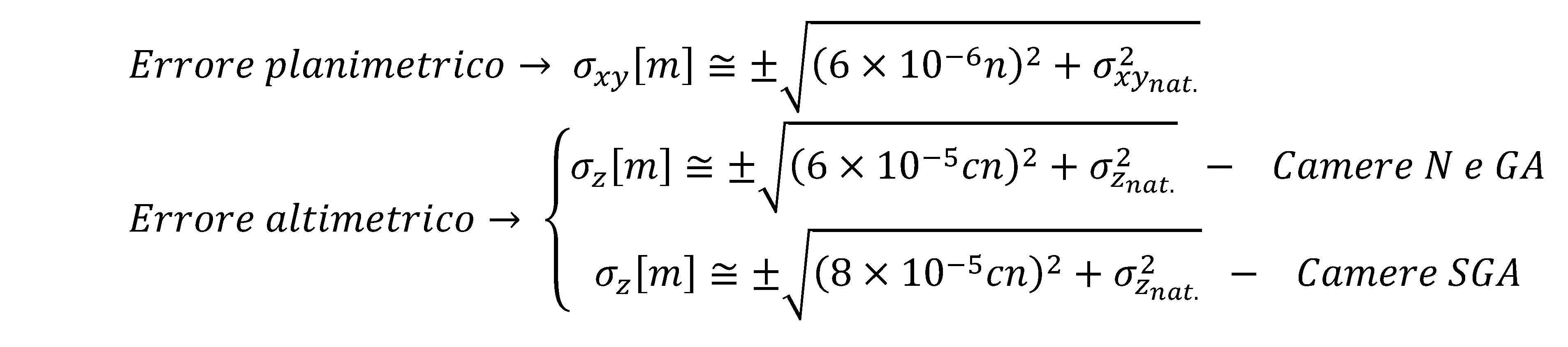
Le relazioni viste pongono in evidenza la precisione ottenibile dai vari prodotti fotogrammetrici, quindi la scala media del fotogramma può essere ricavata indirettamente. Altra relazione empirica di ampio uso è quella di Von Gruber, molto usata in Italia, ove viene posta in relazione la scala media del fotogramma n con quella della carta m.
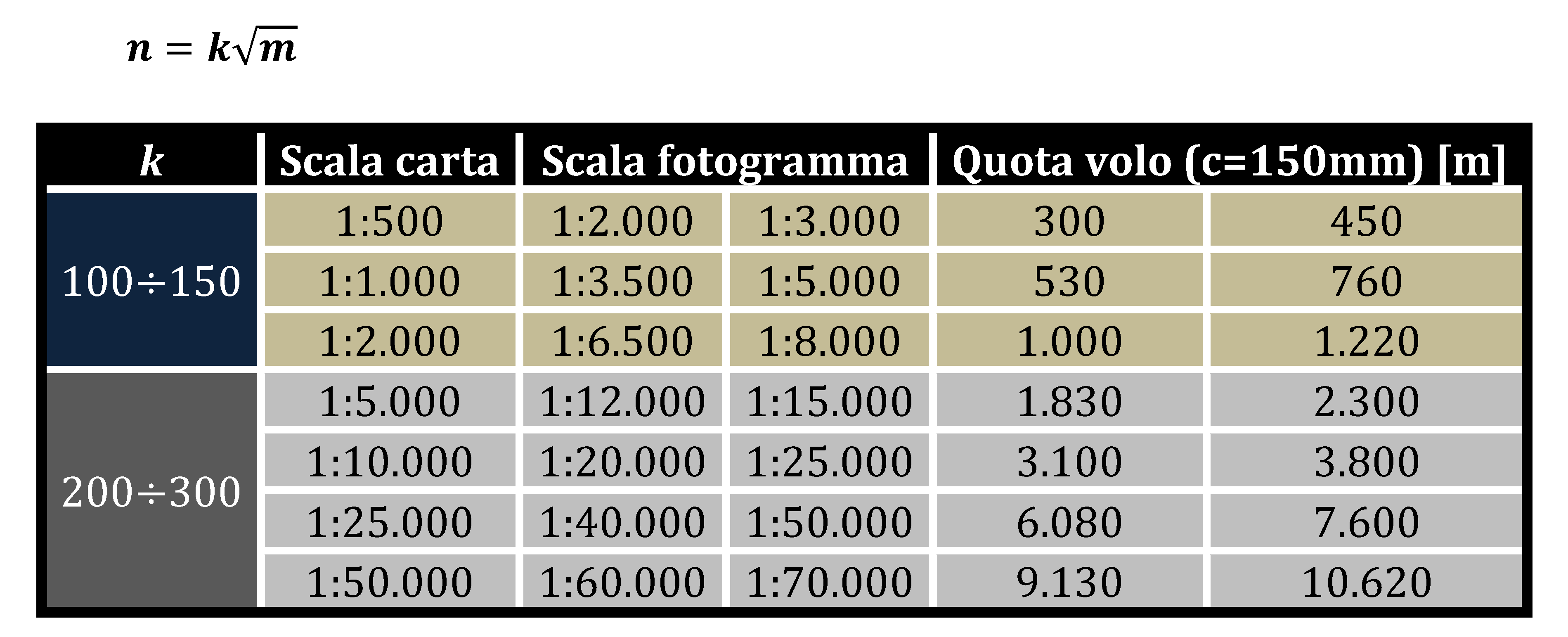
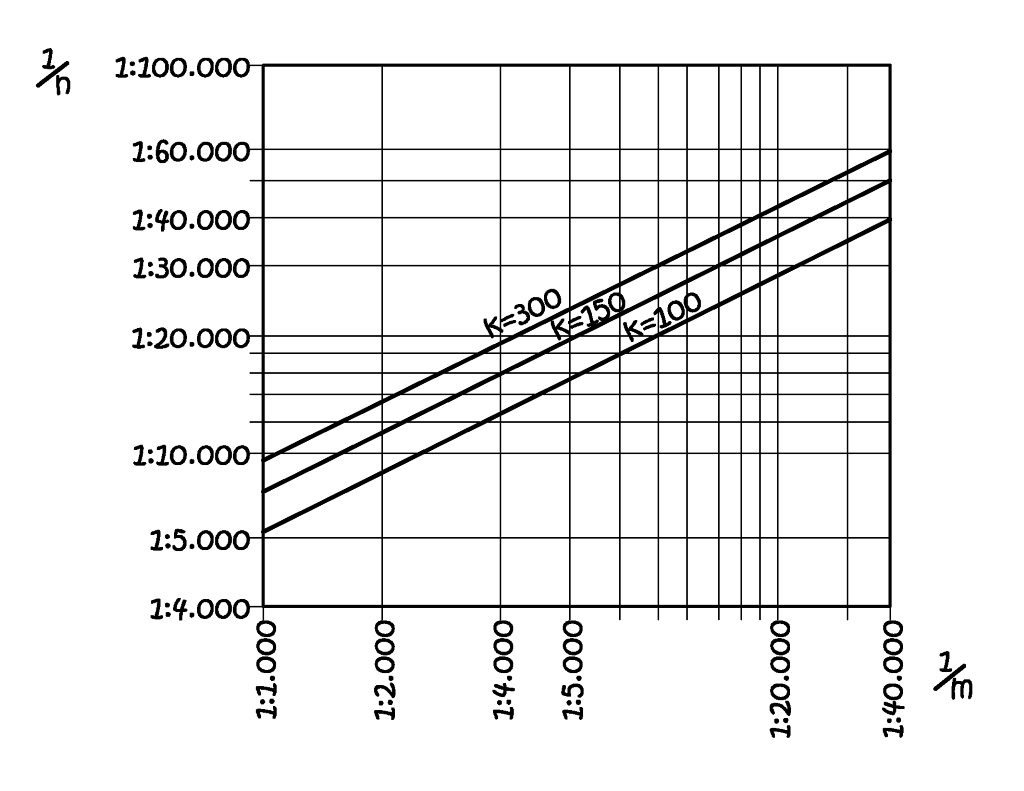
Fig. 2.25 – Diagramma logaritmo della relazione di Von Gruber.
Per soddisfare il principio fondamentale della fotogrammetria, è necessario che ogni generico punto del terreno, sia ripreso da almeno due fotogrammi consecutivi. La presa dei fotogrammi è organizzata secondo percorsi rettilinei e paralleli. I fotogrammi ripresi lungo uno stesso percorso rettilineo costituiscono una strisciata. L’insieme di più strisciate viene chiamato blocco. Per garantire la costruzione dei modelli stereografici le varie prese devono consentire dei ricoprimenti, sia in senso longitudinale (μ-endlap), sia in senso trasversale (ε-sidelap). I fattori che influenzano la scelta di questi parametri di progetto, possono essere così riassunti.
- Si deve rendere la base di presa b il più possibile ampia, in modo da
ottenere una buona intersezione geometrica dei raggi omologhi.
- Il modello deve avere la maggior area di abbracciamento possibile.
- Si deve tenere in debito conto che la qualità della presa (deformazioni
radiometriche, minor potere risolvente dell’obiettivo) decade in corrispondenza
dei bordi del fotogramma.
Dato che il terreno non è perfettamente pianeggiante, e le prese non saranno mai nadirali, ragione e prudenza vuole dunque che, in terreni pianeggianti, il ricoprimento longitudinale sia all’incirca del 60%, e quello trasversale del 20%. Si osservi inoltre che tale valore di ricoprimento longitudinale garantisce una sovrapposizione dei modelli del 20%, in riferimento al singolo frame, e del 33% in riferimento al modello medesimo.
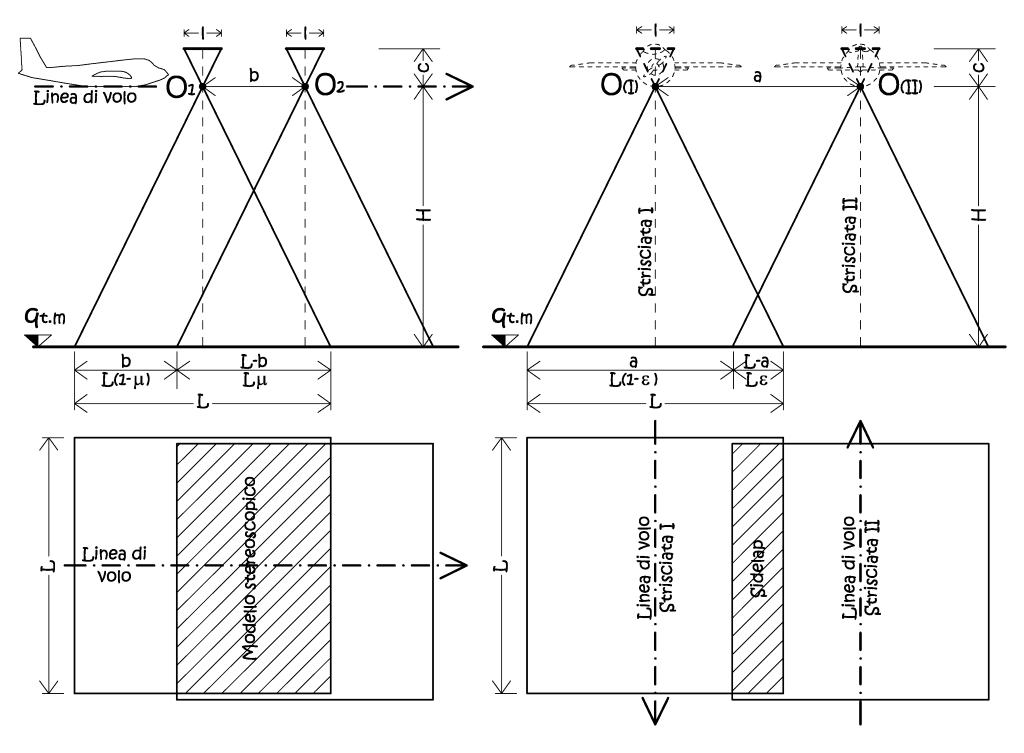
Fig. 2.26 – Sovrapposizione longitudinale (endlap) e trasversale (sidelap).
Come già anticipato, sempre nell’ipotesi di terreno pianeggiante e presa nadirale, la base di presa b, può facilmente ricavarsi:

Allo stesso modo posiamo esprimere l’interasse a tra due strisciate adiacenti:

La conoscenza degli interassi di presa, ci consente di calcolare l’area efficace di ricoprimento stereoscopico, ed inoltre, possiamo definire il numero di fotogrammi N f necessari alla restituzione di una zona di area data S.

Questo valore andrà aumentato del 20%, per tenere conto delle irregolarità e dei margini. Ultimo parametro che andiamo ad introdurre per il progetto del rilievo aereofotogrammetrico, è l’intervallo di presa ∆t, cioè il tempo che intercorre tra uno scatto e quello successivo, ed è legato alla velocità v dell’aeromobile.

aspetti operativi ed operazioni topografiche a terra .
Dopo aver definito tutti gli aspetti geometrici, si procederà al tracciamento
del “grafico del piano di volo”; questa è la carta che servirà al pilota
per l’esecuzione del volo medesimo, e dovrà contenere tutte le informazioni
necessarie.
• Tracciato planimetrico degli assi delle strisciate.
• Quota di volo assoluta (barometrica).
• Particolari facilmente visibili, che possono essere usati per favorire
la navigazione.
In particolare si deve prestare attenzione alla configurazione spaziale
del volo medesimo, dato che, devono essere contenute al minimo il numero
di strisciate. Quindi se la zona da riprendere è ampia si usano le normali
direzioni Nord-Sud ed Est-Ovest, mentre se l’area da ricoprire presenta
una dimensione preponderante, gli assi delle varie strisciate devono essere
parallele a questa. Questo nel caso di presa aerea indistinta, diverso
invece il caso di presa vincolata alle entità oggetto del rilievo, come
linee costiere o movimenti franosi. Gli schemi adottati per la ripresa
sono generalmente due; nel primo, il più usato, gli assi di volo, alterno
o contigui, sono di senso contrario, nel secondo sono invece dello stesso
senso (Fig. 2.21).
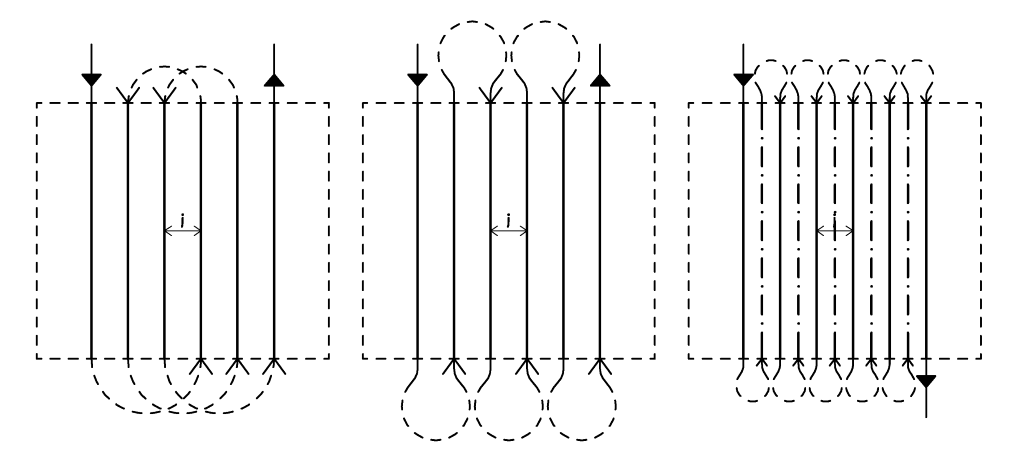
Fig. 2.27 – Organizzazione del piano di volo, nelle due configurazioni di sinistra, le rotte percorse sono fra loro discordi, mentre nel caso di destra le rotte sono concordi.
Il momento ottimale per la realizzazione di una presa si verifica allorquando il cielo si presenta privo di nubi o di foschia, con assenza di ventosità e nelle ore a cavallo di mezzogiorno, condizioni queste tipiche del periodo estivo. Ma in realtà i periodi migliori sono quelli primaverili ed autunnali, quando la vegetazione non è ancora rigogliosa, o dopo la caduta delle foglie. In tali contesti infatti la visione della superficie terrestre risulta completa, mentre l’assenza di vento rende più agevole il volo del velivolo. Condizioni che, nel nostro paese, si possono verificare statisticamente per trenta giorni all’anno. Nei vari capitolati spesso viene indicata una inclinazione massima al di fuori dalla condizione nadirale di 3-5°, e ad ogni modo l’altezza solare non può essere inferiore ai 30°. Altra operazione che si svolge preliminarmente al volo è l’identificazione dei vertici della rete geodetica preesistente, con l’individuazione dei capisaldi dislocati nella zona interessata dal rilievo; essa costituirà l’ossatura portante della rete generale d’inquadramento. Nell’epoca del GPS i punti di raffittimento andranno individuati successivamente al volo, dato che questi devono essere ben visibili nelle foto, per consentirne la collimazione in sede di restituzione.
Fino alla fine degli anni ’90 i punti fotografici d’appoggio (PFA) erano ricavati con triangolazioni, intersezioni multiple e poligonali d’appoggio, con l’uso di stazioni totali, ma questi metodi di rilievo topografico non sempre erano sufficienti a garantire una precisione accettabile in quota, quindi, per le quote, si operavano delle livellazioni geometriche ad elevata precisione, appoggiandosi alla rete nazionale di livellazione esistente. Ovviamente il rilievo non terminava con la fase di campagna, ma ci si doveva mettere “a tavolino” per calcolarsi le coordinate con i canonici metodi di compensazione ai minimi quadrati (Metodo di Lagrange). Storicamente, nella fotogrammetria analitica, per ogni modello stereografico si dovevano individuare quattro punti pieni, cioè noti nelle loro tre coordinate, più un punto altimetrico, spesso posto in posizione centrale, di quota nota. In questo modo il problema risulterà iperdeterminato, dato che, come vedremmo, sarebbero strettamente necessari tre punti pieni per orientare correttamente un modello. Con più punti a disposizione si avranno dei residui di osservazione, detti residui d’orientamento, che consentono di verificare la qualità del rilievo medesimo.
Con l’avvento del GPS, possiamo rilevare molti più punti, con modalità operative svincolate da una profonda analisi del territorio, come invece era d’uopo in passato, dato che, si doveva garantire l’intervisibilità delle varie stazioni base. Le varie metodologie di rilievo GPS possono essere usate in modo indipendente, oppure assieme, in ragione delle diverse esigenze operative e di precisone richieste. Ad esempio, per definire un nuovo vertice di raffittimento della rete IGM nazionale, si dovrà usare il metodo del rilievo statico differenziale, possibilmente in abbinamento alle effemeridi precise, in sede di calcolo, rese disponibili dai vari centri di elaborazione del segmento di controllo. In tal caso le precisioni raggiungibili saranno inferiori al centimetro, in ragione della lunghezza della base6. Mentre per i punti fotografici d’appoggio (PFA) possiamo usare anche il rilievo statico rapido, oppure il cinematico RTK, ove la stazione rover e master sono direttamente in comunicazione, e ciò consente di ottenere il calcolo delle coordinate WGS84 direttamente sul posto. In tal caso le precisioni ottenibili sono nell’ordine di qualche centimetro, valori del tutto compatibili con le richieste della commissione geodetica italiana. Una prima stima degli errori nel rilievo GPS può essere fornita dalle seguenti relazioni.

Si noti che per basi di 20Km il metodo di rilievo cinematico fornisce un errore massimo di 3cm; se abbiamo la necessità di basi superiori, abbiamo due possibilità, la prima contempla la realizzazione di una stazione master ex novo, con i dovuti dettami di precisione, la seconda possibilità è di cercare un caposaldo della rete ETRF nelle sue varie realizzazioni, nazionali o regionali.