google earth.
Il programma all’inizio si denominava Keyhole ed era sviluppato dalla Keyhole inc., ma nel 2004 la società venne acquistata da Google e il software rinominato di conseguenza. Esistono diverse versioni, sia per piattaforma Windows, Mac OS o Linux, ma anche per dispositivi mobili basati su Android o iOS. L’applicativo si presenta sostanzialmente con una semplice interfaccia di esplorazione (Fig. 4.2), grazie alla generazione di una visuale virtuale tridimensionale, formata da immagini satellitari ottenute dal telerilevamento terrestre, fotografie aeree e dati topografici/cartografici memorizzati in una piattaforma GIS. Quest’ultima caratteristica è pertinente, dato che il programma consente la registrazione di contenuti georiferiti, organizzati in layers, caratteristiche proprie di un qualsiasi sistema di informazione geografica.
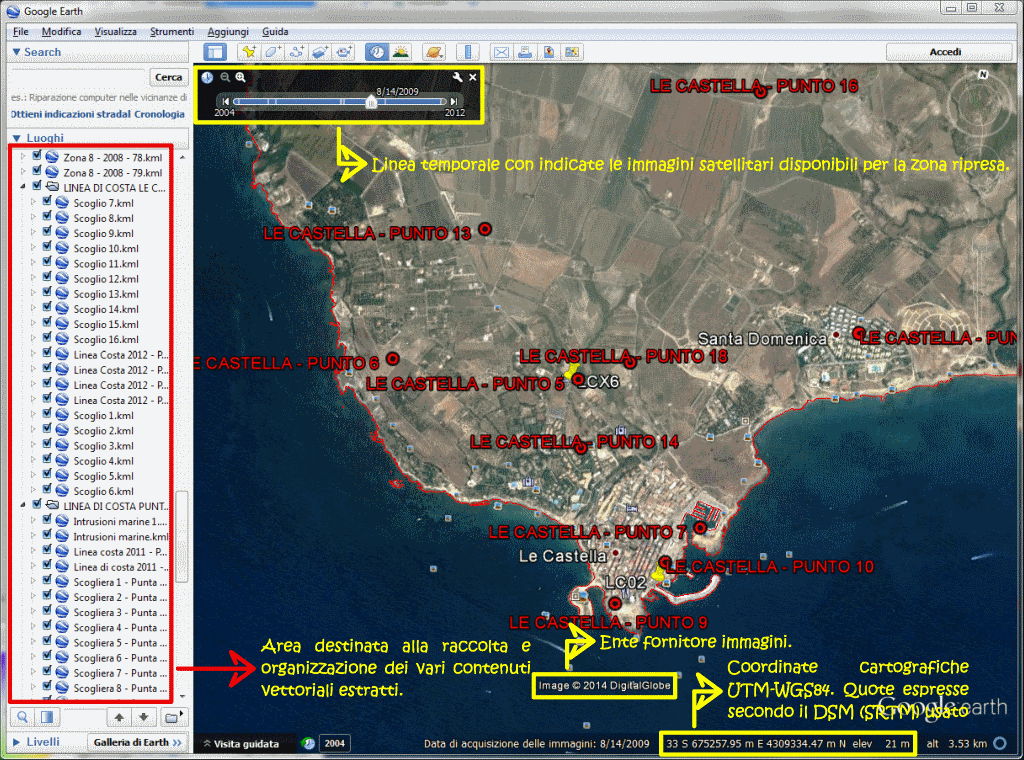
Fig. 4.2 – Interfaccia utente del GIS Google Earth, qui posizionata su Le Castella.
Il layer della vista satellitare è formata dalla mosaicatura di immagini satellitari forniti alla Google da aziende terze, tra le quali merita menzione Digital Globe, che ha svolto un ruolo pioneristico nello sfruttamento commerciale delle immagini satellitari per la mappatura ed il monitoraggio delle risorse terrestri. Difatti è stata la prima azienda, nel 1992, ad ottenere la licenza commerciale per l’osservazione satellitare ad alta risoluzione, attività che fino ad allora era riservata agli enti governativi.
LA PIATTAFORMA SATELLITARE.
Digital Globe ha fatto uso di varie costellazioni satellitari che si sono susseguite nelle loro varie versioni, quella attualmente in uso vede l’impiego di satelliti QuickBird (Fig. 4.3). Si tratta di sistemi pushbroom dotati di sensori lineari multipli, che riprendono con continuità il territorio sorvolato, non solo con viste nadirali ma anche oblique. Le immagini digitali sono assemblate linea per linea, quindi, come si è già scritto, lo schema geometrico è ancora quello della prospettiva centrale, ma applicata alla singola linea d’integrazione. Questo implica una variazione continua nel tempo dei parametri di orientamento esterno, ovvero posizione del centro di presa, ed angoli cardanici d’assetto. Ancor di più per le piattaforme satellitari che possono cambiare angolo di vista, anche se le prese messe a disposizione sono solitamente le pseudo-nadirali, quindi con angoli di presa tra ±15° dalla verticale. Nelle piattaforme di presa satellitare si opera la distinzione tra presa sincrona e presa asincrona, nel primo caso la velocità del vettore è uguale alla velocità della scansione al suolo, mentre, al contrario, nel secondo caso la velocità di scansione è superiore, od inferiore, alla velocità orbitale del mezzo. Senza addentrarci nelle mere questioni tecniche, la presenza di velocità differenziali, date da movimenti “a pendolo” del mezzo, introducono delle ulteriori deformazioni nelle immagini acquisite, con variazioni non trascurabili della risoluzione al suolo; variazioni che dovranno essere opportunamente modellizzate durante la fase di stima dei parametri d’orientamento esterno. Anche le recenti evoluzioni lasciano ritenere che il sistema asincrono sia in via di abbandono.
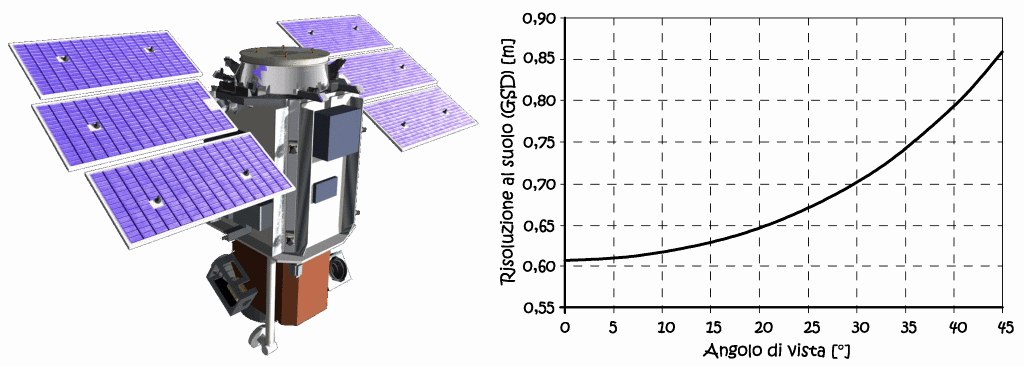
Fig. 4.3 – Piattaforma satellitare QuickBird e rispettiva risoluzione al suolo, in funzione all’angolo di presa con quota orbitale di 450Km.
Tutti i satelliti utilizzati nella fotografia ad alta risoluzione hanno un’orbita eliosincrona, quindi si presentano a riprendere la medesima zona con le stesse condizioni di illuminazione solare, ciò consente l’uniformità delle condizioni di ripresa delle immagini.
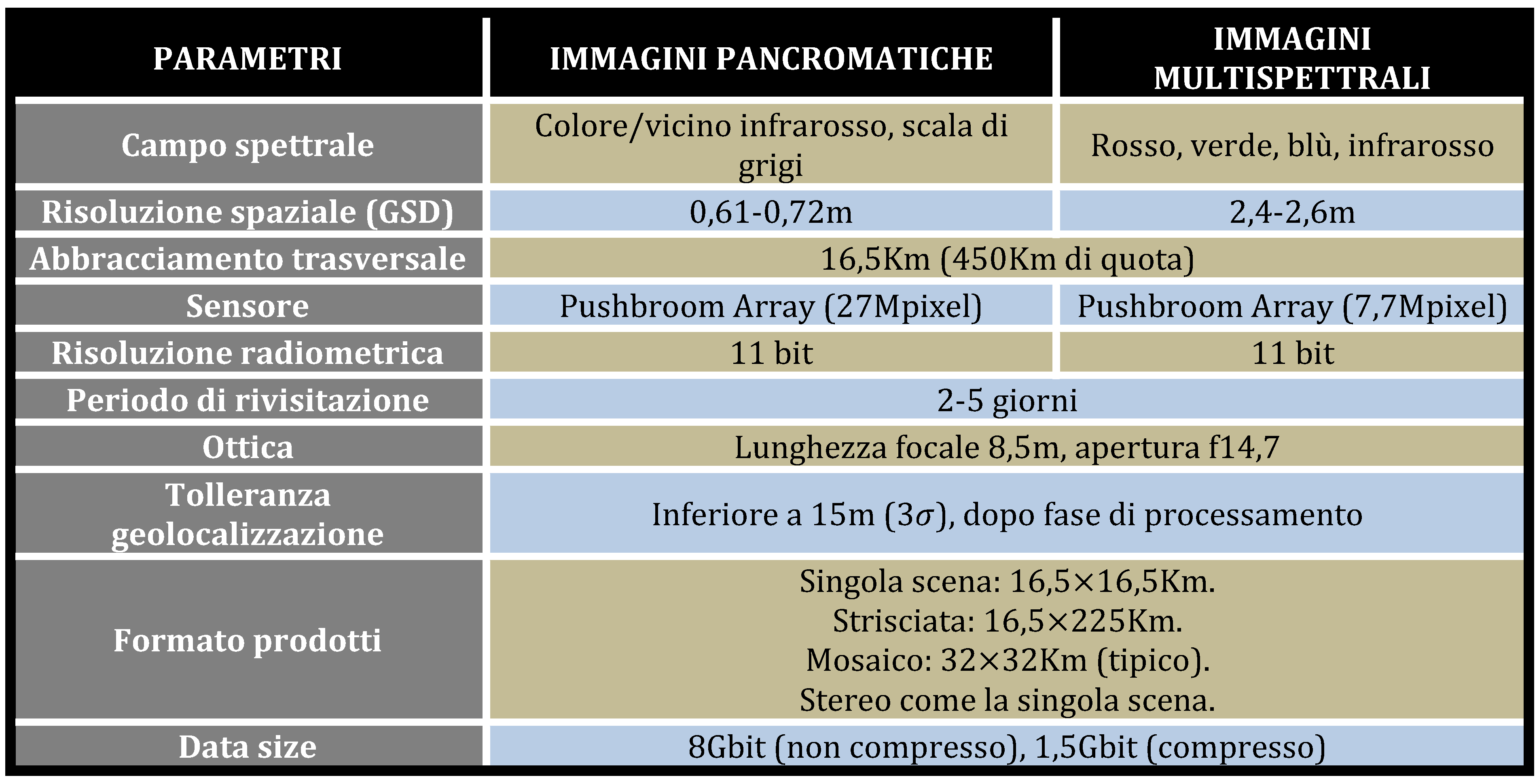
Della tabella qui sopra ci interessano in particolare due dati, la risoluzione spaziale, e la precisione nella geolocalizzazione, fornita con i prodotti già elaborati, espressa in termini di tolleranza statistica. Quindi andando a riprendere alcuni concetti di statistica, in particolare l’integrale della distribuzione della variabile normale standard, cioè la gaussiana di una ipotetica variabile casuale avente media nulla e varianza pari all’unità. Ne consegue che le probabilità che la valutazione del singolo dato ricada all’interno dei seguenti intervalli ci è fornita dalle seguenti:

Si è accentato al fatto che questi satelliti sono destinati ad essere a breve sostituiti, difatti negli stabilimenti della Ball Aereospace in Colorado, è in costruzione il WorldView-3 (Fig. 4.4), il successore. Le prestazioni sostanzialmente verranno raddoppiate, difatti dai 60cm consenti dall’attuale piattaforma, si passerà alla categoria dei dieci pollici, circa 25cm. Purtroppo per vincoli di sicurezza imposti dalla legislazione americana, tali dati saranno resi disponibili solo ai clienti governativi, mentre per i privati, come Google, potranno accedere alle immagini con un GSD di 50cm. Le immagini ad alta risoluzione per i prodotti di mappatura in aree più limitate, come le città ed i centri maggiori, vengono invece ottenute con le classiche tecniche fotogrammetriche. Ciò consente anche di by-passare quelli che sono ancora i vincoli normativi all’uso delle immagini satellitari ad elevata risoluzione.
NOTA A MARGINE.
Il 14 Maggio del 2014 è stata presentata una petizione da parte della Digital Globe al NOAA (Department of Commerce and the National Oceanic), organo predisposto alla regolamentazione dei satelliti commerciali. La petizione ha ricevuto pure il sostegno da parte degli organi di intelligence, ora sarà compito delle altre agenzie (in primis quella della difesa) e del governo, valutare la rimozione dei vincoli, o il loro abbassamento

Fig. 4.4 – Il satellite WorldView-3 durante le fasi di costruzione.
Cenni al modello di trasformazione.
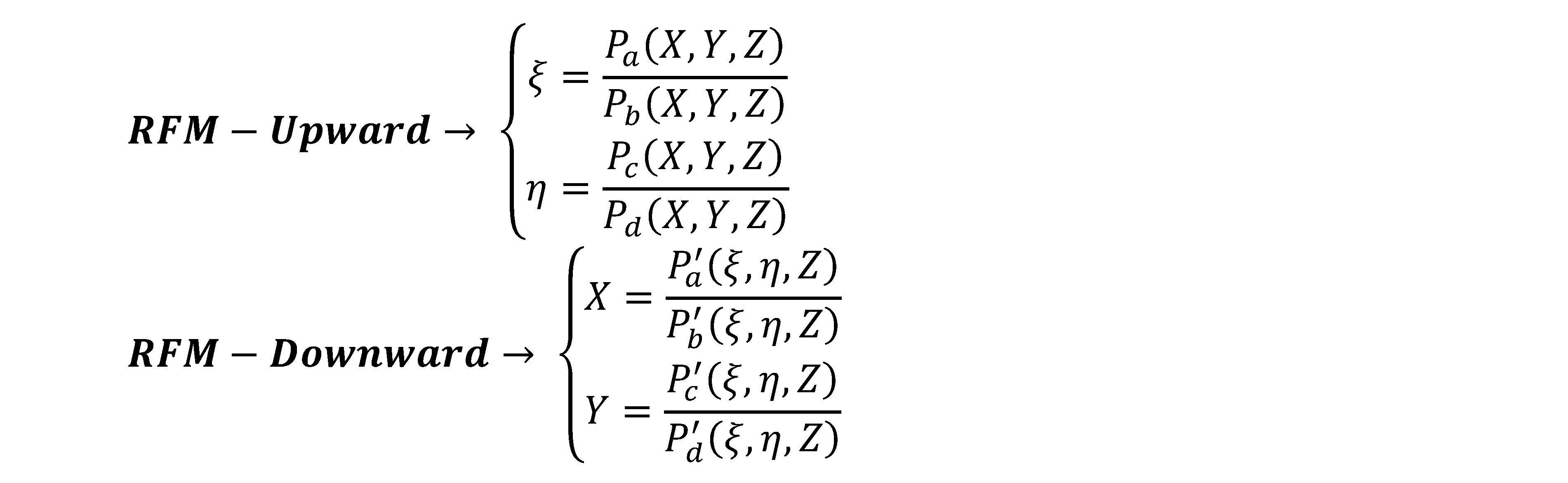
Come si è già scritto i modelli di proiezione utilizzati ben si discostano da quelli che sono i dettami della fotogrammetria aerea classica. Anche se le equazioni di collinearità sono ancora valide per ogni singola linea d’integrazione, queste richiedono la conoscenza delle caratteristiche fisiche e ottiche della piattaforma satellitare (i parametri d’orientamento interno), ma non sempre queste informazioni sono rese disponibili dalle aziende. Grazie ad un accordo tra le stesse aziende produttrici delle immagini satellitari, e le maggiori software house, si sono trovati dei metodi di proiezione svincolati dalla conoscenza dei dati satellitari, coperti da brevetti industriali. Oggigiorno trovano sempre maggior utilizzo i modelli generalizzati, ove le coordinate immagine sono correlate a quelle oggetto attraverso polinomi tridimensionali a grado variabile. Fra tutte le possibili soluzioni, per la sua semplicità, il modello generale più utilizzato è quello dei rapporti polinomiali (RFM), i quali si possono presentare in due versioni: upward (verso l’alto) e downward (verso il basso), nel primo caso posso ricavare le coordinate immagine a partire dalle coordinate tridimensionali di un punto oggetto, nel secondo caso il contrario. I polinomi utilizzati sono del terzo ordine, che nelle tre variabili, corrispondono a venti coefficienti da calibrare, questi dipendono dalle distorsioni prospettiche che sono trattate dai termini del primo ordine, dalle distorsioni dovute alla curvatura terrestre, modellata dai termini del secondo ordine, ed infine la rifrazione atmosferica e le caratteristiche ottiche, dagli altri termini, di ordine superiore.
Le aziende fornitrici delle immagini satellitari, allegano assieme al contenuto radiometrico, anche la tabella dei coefficienti della trasformazione polinomiale (RPC – Rational Polynomial Coefficient). Questi sono stimati ai minimi quadrati dai centri di calcolo delle aziende medesime, che possono applicare le trasformazioni dirette, e quindi rigorose, conoscendo le caratteristiche geometriche della propria piattaforma satellitare. In altri termini viene utilizzato un metodo rigoroso, per stimare gli ottanta coefficienti della trasformazione ai rapporti polinomiali, un metodo generale.
IL MODELLO TRIDIMENSIONALE.
Alla sezione precedente si è discusso della fonte radiometrica, ma Google Earth è anche una riproduzione tridimensionale, quindi non si può prescindere dalla conoscenza della terza dimensione. Dal punto di vista geografico il datum è costituito dall’ellissoide di rotazione WGS84, ma questa è una superficie convenzionale, utilizzata per la definizione delle coordinate geografiche, diversa è la riproduzione degli andamenti orografici. In questo caso si è usato il DSM ricavato dalla missione SRTM (Shuttle Radar Topography Mission) nell’anno 2000. Il modello digitale di elevazione ottenuto ha un ricoprimento quasi globale, in particolare esso si estende da 56° latitudine Sud, a 60° latitudine Nord. Le antenne radar (altimetrico ad apertura sintetica) utilizzate erano due: una di queste era posizionata nello spazio di carico dello Shuttle Endeavour, mentre la seconda era montata alla fine di un braccio robotico di 60 metri, che si estendeva dallo spazio di carico verso l’esterno.
I dati sono pubblicamente e gratuitamente disponibili, e sono organizzati in una serie di code, ogni una rappresentate un grado di longitudine ed uno di latitudine, nominati congruentemente in ragione alle coordinate del punto più a Sud-Ovest della coda medesima. Quindi la coda “E006N45”, identifica l’area di ricoprimento avente vertice Sud-Ovest di coordinate 45°00’N-6°00’E. La risoluzione di campionamento a terra è pari a un secondo d’arco per gli Stati Uniti, e di 3 secondi d’arco per il resto del mondo. Quindi il campionamento non si traduce in un grigliato regolare a maglia quadrata, dato lo schiacciamento ellissoidico. In particolare per la nostra penisola (Fig. 4.5) i dati del progetto SRTM sono stati organizzati in nove riquadri, ciascuno dei quali copre un’area pari a cinque gradi quadrati, con una risoluzione pari a (6.001×6.001) pixel.
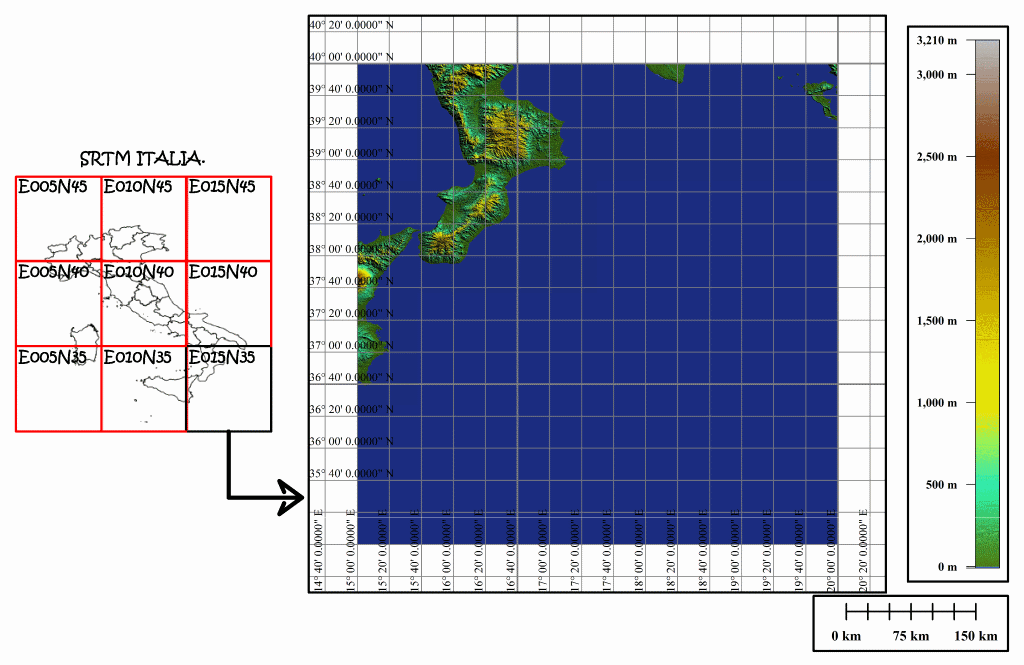
Fig. 4.5 – Il riquadro E015N35 che comprende anche la costa calabrese, elaborazione ottenuta con l’uso di Global Mapper 13.
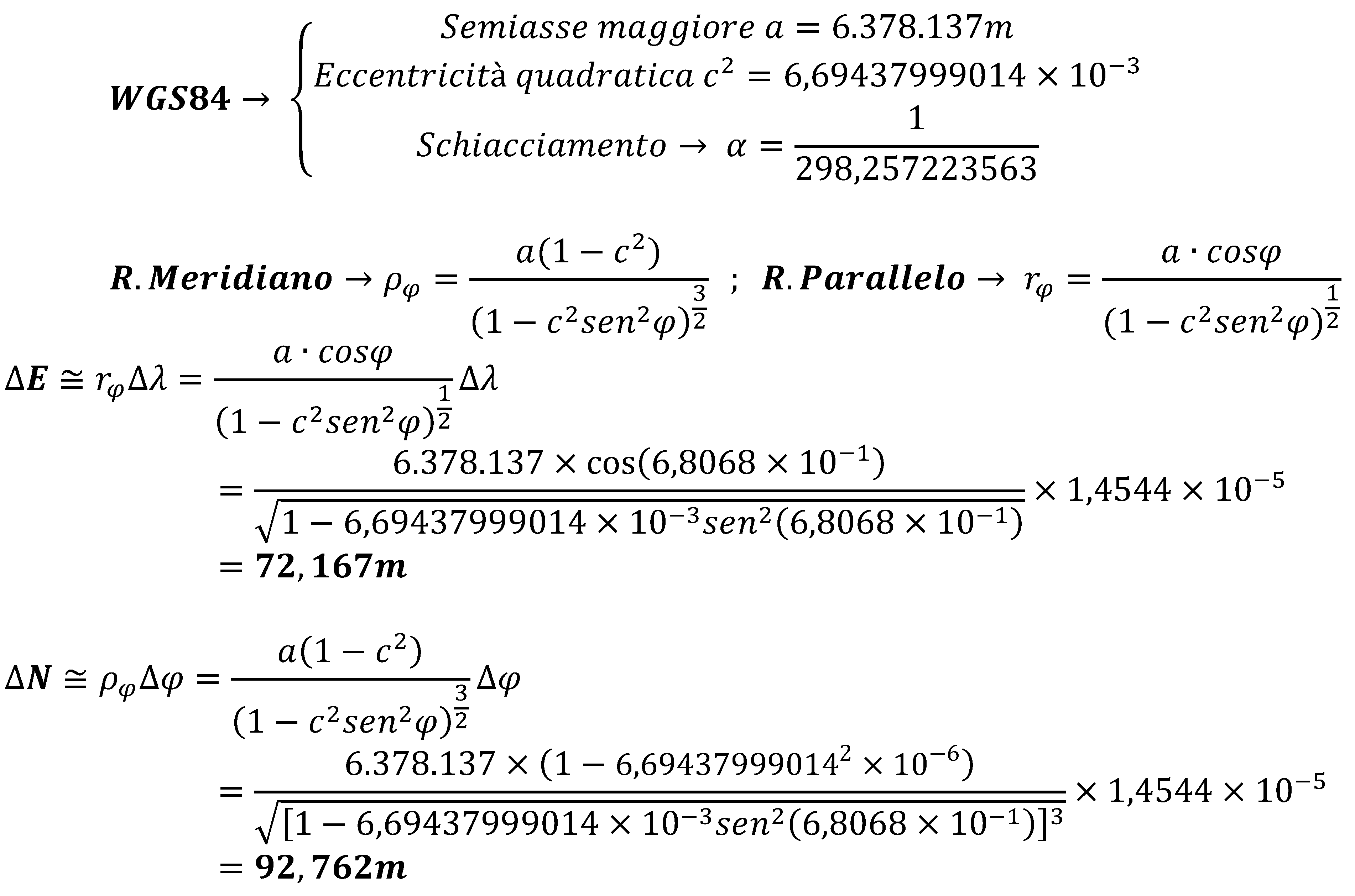
La risoluzione di campionamento varia in ragione della diversa posizione considerata, quindi lungo l’equatore i tre secondi d’arco si traducono in novanta metri di passo griglia. Visto e considerato che la latitudine media di Le Castella è di 39° Nord, utilizzando le note relazioni della geodesia ci possiamo ricavare una stima del passo griglia nella nostra zona di studio.
Il modello digitale di elevazione viene utilizzato per la riproduzione dell’andamento orografico del suolo, ma già da molti anni Google Earth ha introdotto la possibilità di inserire dei modelli poligonali dell’edificato, grazie all’uso di SkechUp, un applicativo di modellazione tridimensionale, liberamente utilizzabile da parte degli utenti. Mentre, dal 2012, grazie all’uso di DDEM, cioè modelli digitali di superficie densi, con un passo di campionamento di pochi centimetri, ricavati da tecniche Lidar, la ricostruzione tridimensionale delle strutture ha assunto carattere estensivo. I vincoli di campionamento del DSM, oltre che un limite tecnico al momento della sua presa, è anche un modo per non appesantire la riproduzione multimediale, andando a compromettere l’usabilità del programma nei personal computer di limitate prestazioni.
Confronto tra l’SRTM ed il DSM di Le Castella.
Non essendo note le tecniche di proiezione adottate all’interno di Google Earth, che pur essendo un programma libero, non è open source, quindi il codice non è pubblicamente disponibile. Appare comunque ragionevolmente interessante operare un confronto tra il modello di elevazione digitale, utilizzato da Goole Earth, e il corrispettivo ricavato dalla nostra applicazione fotogrammetrica concernente il territorio di Le Castella. Da qui in avanti il primo sarà denominato con l’acronimo del progetto, cioè “SRTM”, mentre l’altro semplicemente “DSM”, anche se, come sappiamo, entrambi sono dei modelli digitali di elevazione superficiale. Si consideri che il passo del DSM ricavato dalla restituzione fotogrammetrica è pari a cinque metri, quindi l’area della singola cella è oltre duecento volte inferiore a quella dell’SRTM, ciò si traduce in una migliore descrizione del territorio, soprattutto in quelle zone ove vi sia una marcata variazione altimetrica. Grazie all’uso del programma di analisi Global Mapper è stato possibile ritagliare i due DEM allo stesso modo, andando ad escludere le zone di bordo, ove sono presenti degli artefatti di restituzione. Il rettangolo di analisi ha un’area di 28,66Km^2 con dimensioni di (4,27×6,71)Km.
Prima di affrontare il confronto vero e proprio è richiesto un passaggio preliminare, infatti l’SRTM è stato costruito imponendo la quota del livello medio mare pari a zero, al contrario del DSM ove la quota di riferimento corrisponde al valore ricavato dal mareografo di Catania, nel momento della presa. Il che, ancora una volta, dimostra come il riferimento verticale possa essere diversamente valutato ed interpretato. L’operazione di co-registrazione è avvenuta importando i valori tabellari in Excel, ed imponendo il medesimo valore di quota mare, cioè 35,71m. Già da una prima valutazione della Fig. 4.6 si evidenza il diverso grado di dettaglio, soprattutto nella descrizione dei particolari più minuti del territorio, come lo stesso isolotto dove è sito il Castello, che nel caso del modello SRTM, diviene un tutt’uno con l’entroterra. È evidente che il milione di nodi quotati del grigliato DSM, forniscono complessivamente una prestazione rappresentativa ben diversa dai poco più dei quattromila punti del corrispettivo modello SRTM.
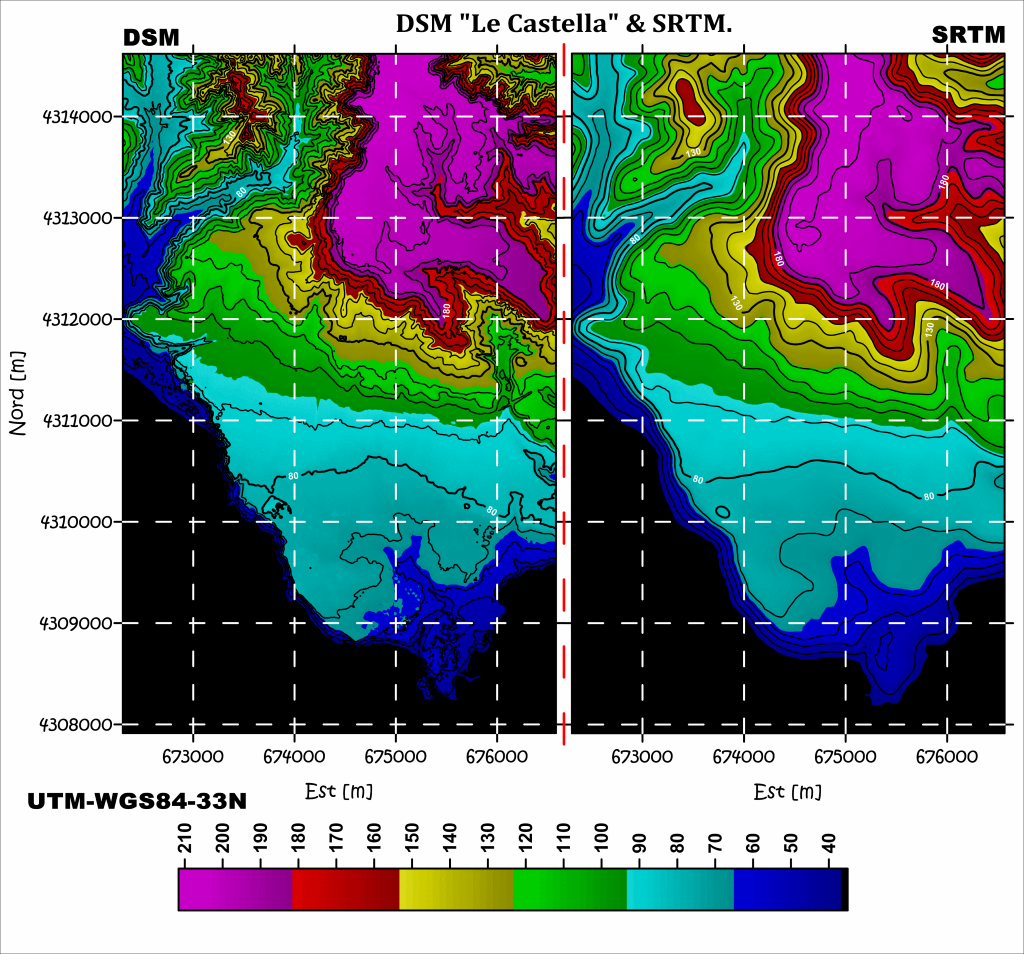
Fig. 4.6 – Raffronto diretto tra i due modelli di elevazione, si noti il maggior dettaglio del DSM ottenuto da processo fotogrammetrico. Le isoipse configurano differenze di quota pari a dieci metri, ed i parametri di gridding usati in Surfer sono i medesimi.
Il territorio di Le Castella presenta un andamento decliviante verso il mare, a partire da quote collinose, ma presenta pure un tratto di costa alta, quindi una zona di area limitata con un’elevata escursione in quota: condizioni perfette per un confronto diretto tra i due modelli di elevazione (Fig. 4.7). Confronto operato facendo la differenza, quindi valutando lo scarto metrico, tra il DSM fotogrammetrico ed il modello SRTM. Come era intuibile le maggiori differenze si hanno in corrispondenza degli acclivi maggiori, ove il maggiore passo griglia del modello SRTM non consente di descrivere compiutamente il diverso andamento orogenico. Le zone maggiormente interessante sono nella parte collinosa del territorio, e il tratto di costa alta, con valori peraltro negativi, quindi la superficie dell’SRTM è al di sopra di quella del DSM, ciò può essere spiegato dall’incapacità del primo di individuare l’inizio della riva con la sufficiente precisione.
Come si è già discusso, i modelli di trasformazione utilizzati nella proiezione delle immagini satellitari includono anche l’informazione sulla quota, dato che sono modelli di trasformazione polinomiale tridimensionale. I coefficienti sono pesati dalle stesse aziende che curano i sistemi di acquisizione, mentre la texturizzazione sul modello poligonale del contenuto radiometrico è curato dalla stessa Google. Se questi passaggi operativi si traducono in una diversa precisione planimetria, funzione della diversa risposta del modello digitale di elevazione, non è facile affermarlo; certamente le quote espresse possono subire anche variazioni di decine di metri, nelle parti più sfavorevoli, rispetto ad un DEM di categoria superiore, situazione che ne scoglia l’uso in ambito tecnico.
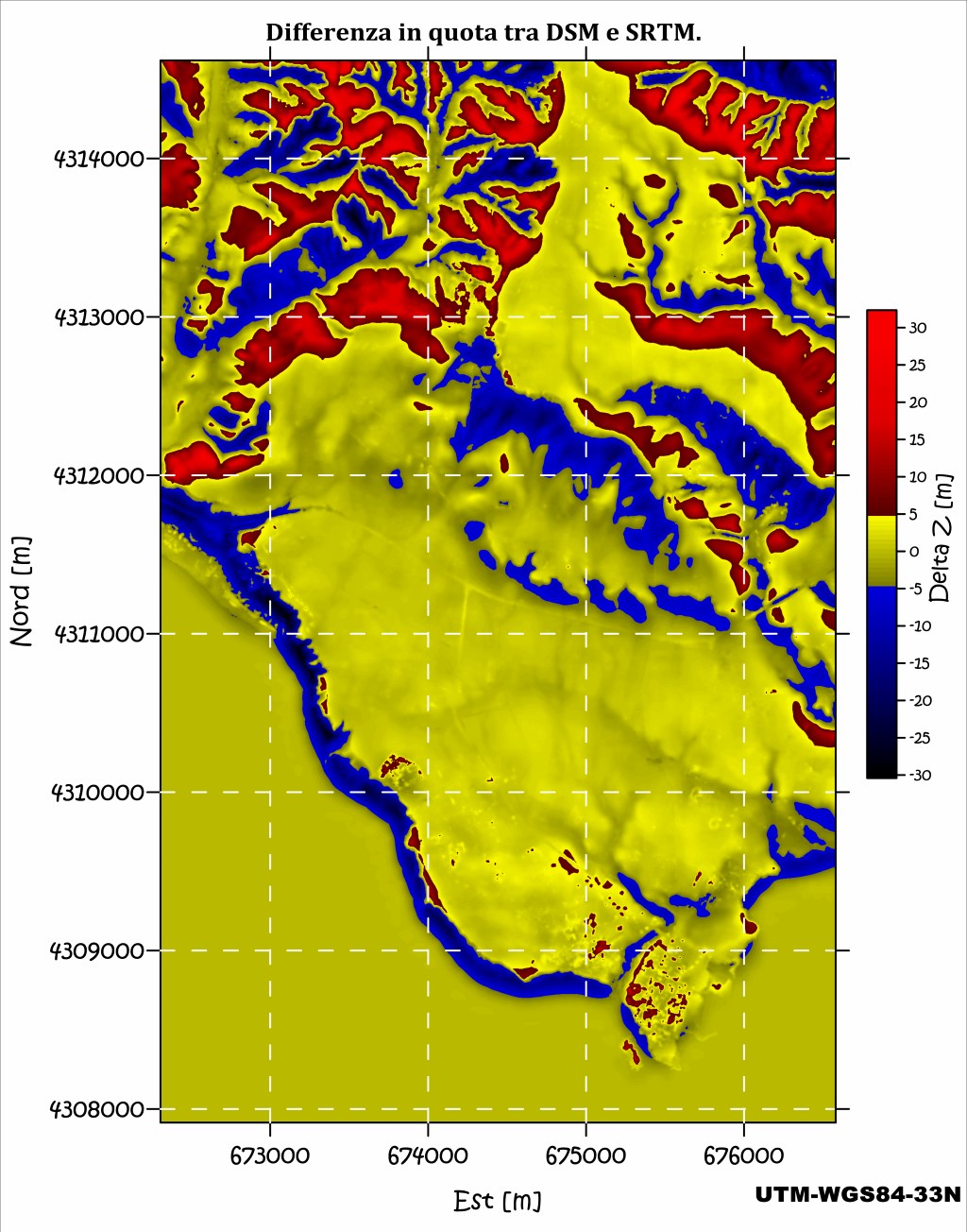
Fig. 4.7 – Differenza (scarto) in quota tra i due modelli di elevazione [DSM-SRTM].
L’ESTRAZIONE DEL DATO PRIMARIO.
Si è già anticipato che Google Earth è un GIS, dato che consente l’organizzazione dell’informazione geografica in layers, correttamente georiferiti. Anche se questo è certamente vero, non è pensato per un utilizzo professionale, dato che l’informazione posizionale non è immediatamente disponibile all’utente. Per la gestione dei vari elementi grafici, che possono essere anche inseriti dall’utilizzatore, viene usato il KML (Keyhole Markup Language), un meta-linguaggio di programmazione, creato per gestire dati geospaziali. Questo linguaggio è diventato uno standard internazionale aperto e riconosciuto dalla Open Geospatial Consortium nel 2008. Lo standard prevede un set di elementi (segnalibri geografici, immagini, poligoni, vettori, modelli tridimensionali, descrizioni ed etichette testuali, ecc.) da visualizzare in Google Earth, e negli applicativi ad esso collegati (Google Maps). Le informazioni sono salvate in un file con estensione .kml, che può essere letto con un qualsiasi editor testuale, in esso sono contenute anche le coordinate geografiche dei vari elementi visuali. Anche se in Google Earth è prevista la visualizzazione delle coordinate cartografiche UTM-WGS84, gli elementi saranno georiferiti sempre e comunque con le loro coordinate geografiche WGS84, quindi l’operatore dovrà spesso operare delle conversioni. Ed inoltre per avere un file utilizzabile, ed importabile nelle altre applicazioni, le coordinate andranno estratte e sistemate, in righe e colonne, con opportune segni di demarcazione, operazioni che possono richiedere un certo impegno (Fig. 4.8).
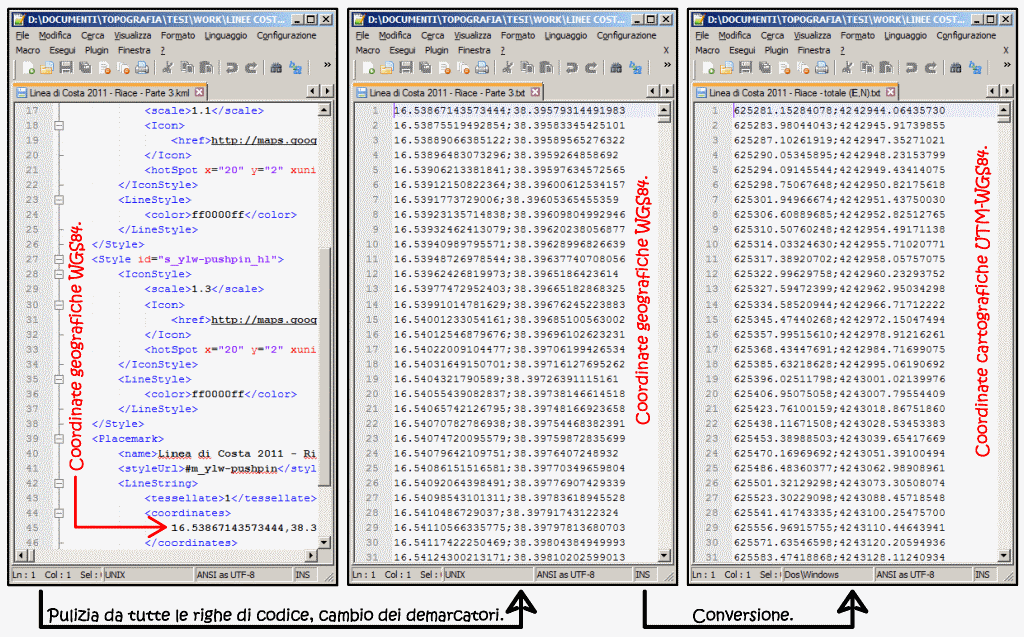
Fig. 4.8 – L’eliminazione di tutte le righe di codice ed il cambio dei demarcatori, cioè dei separatori delle coordinate, e la loro messa in colonna, tutte operazioni portate a termine con l’editor NotePad++, che supporta la memorizzazione di macro operative, quindi molte delle procedure possono essere automatizzate. Il cambio dei demarcatori si è resa necessaria per consentire la corretta importazione delle coordinate nel servizio online di conversione, messo a disposizione dal Ministero dell’Ambiente (Geoportale).